





























User Manual Of EL7-EC** AC Servo
227
can be used to improve command responsiveness and closed loop control used to
increase responsiveness of the system towards interference. They don’t affect each
other.
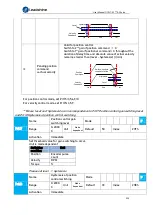
Model following control can be used in position loop control to increase responsiveness
to commands, reduce positioning time and following error. This function is only available
in position control mode.
+
Position
loop gain
Velocity
loop
gain
Velocity
feedforward
Torque
feedforward
Current
loop
control
Motor
Encoder
Velocity
feedback
Current
feedback
Position
Command
Position
filter
-
+
+
-
+
+
Position
feedback
+
Velocity
loop integral
time
constant
-
MFC
To adjust model following control
1.
Automatic adjustment
Set model following bandwidth Pr0.00 = 1 for automatic adjustment. Now, Pr0.00 =
Pr1.01, model following bandwidth is adjusted automatically according to different
velocity loop gain.
2.
Manual adjustment
Please used manual adjustment if
Automatic adjustment is not satisfactory.
Responsiveness needs further improvement in comparison with automatic
adjustment.
There is a need to set servo gain or model following control parameters
manually.
Steps to manually adjust
Step
Content
1
Set up vibration suppression.
2
Set up the right inertia ratio.
3
Manually adjust gain.
4
Increase Pr0.00 provided that there is no overshoot and vibration. Usually
Pr0.00
≥
Pr1.01 is recommended.
Model following bandwidth determines the responsiveness of the servo system.
Increase the value set will increase responsiveness and reduce positioning time.







































































