




























User Manual Of EL7-EC** AC Servo
248
7
To set encoder resolution
Index
6091h-01
Name
Electronic gear ratio
numerator
Unit
r
Structure
VAR
Type
Dint 32
Access
RW
Mapping RPDO Mode
F
Range
1-21474
83647
Defaul
t
1
To set electronic gear ratio numerator
Index
6091h-02
Name
Electronic gear ratio
denominator
Unit
r
Structure
VAR
Type
Dint 32
Access
RW
Mapping RPDO Mode
F
Range
1-21474
83647
Defaul
t
1
To set electronic gear ratio denominator
Index
6092h-01
Name
Number of pulses per
rotation
Unit
Comma
nd unit/r
Structure
VAR
Type
UInt
32
Access
RW
Mapping RPDO Mode
F
Range
1~21474
83647
Defaul
t
10000
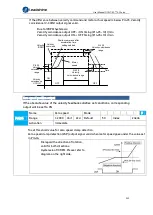
If 6092h-01(Feed constant) is not equal to 608Fh(Position encoder resolution), then:
Electronic gear ratio = Encoder resolution / 6092h-01
If 6092h-01(Feed constant) is equal to 608Fh(Position encoder resolution), then:
Electronic gear ratio = 6091-01 / 6092h-01
Position command filter function
To smoothen the position command after frequency divider/multiplier
Pr2.22
Name
Position command
smoothing filter
Mode
PP
HM
CS
P
Range
0~32767 Unit 0.1ms Default
0
Index
2222h
Activation
Stop axis
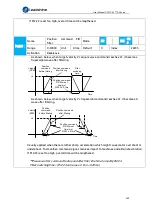
To set time constant of 1 time delay filter of position command.
To set time constant of 1 time delay filter, according to target velocity Vc square wave
command as show below.
Velocity
(RPM)
Position
command
before filter
Position command
after filter
Filter
switching
time
Time
Vc
Vc 0.632
Vc 0.368
Position command
smoothing filter set
time(ms)
Pr2.22 x 0.1ms
Usually applied when there is rather sharp acceleration which might cause motor overshoot or
undershoot. To smoothen command signal, reduces impact to machines and eliminate vibration.







































































