





























User Manual Of EL7-EC** AC Servo
228
Overshoot can be prevented if it is set at a lower value but responsiveness will be
lowered. Model following bandwidth shouldn’t be too large for mechanical structure with
lower stiffness, excessive position deviation alarm might occur under high velocity.
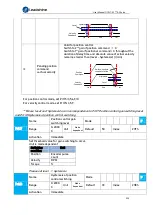
6.8 Friction compensation function
This function is to compensation for changes in load to reduce the effect of friction in
motion. The compensation value is directional.
Motor off
Motor on
Motor off
Velocity
command
Pr6.08
Pr6.09
Pr6.07
Time
Velocity
command
Vertically loaded axis: A constant eccentric load torque is applied on the motor. By
adjusting Pr6.07, positioning deviation due to different motional direction can be reduced.
Belt-driven axis: Due to large radial load with dynamic frictional torque. Positioning time
delay and deviation can be reduced by adjusting Pr6.08 and Pr6.09.
Pr6.07
Name
Torque command
additional value
Mode
F
Range
-100~100
Unit
%
Default
0
Index
2607h
Activation
Immediate
To set torque forward feed additional value of vertical axis.
Applicable for loaded vertical axis, compensate constant torque.
Application: When load move along vertical axis, pick any point from the whole motion and stop
the load at that particular point with motor enabled but not rotating. Record output torque value
from d04, use that value as torque command additional value (compensation value)
Pr6.08
Name
Positive direction torque
Mode
F







































































