



























User Manual Of EL7-EC** AC Servo
85
Pr3.02
Label
Velocity command input
gain
Mode
F
Range
10~2000 Unit
(r/min)/V
Default
500
Index
2302h
Activation
Immediate
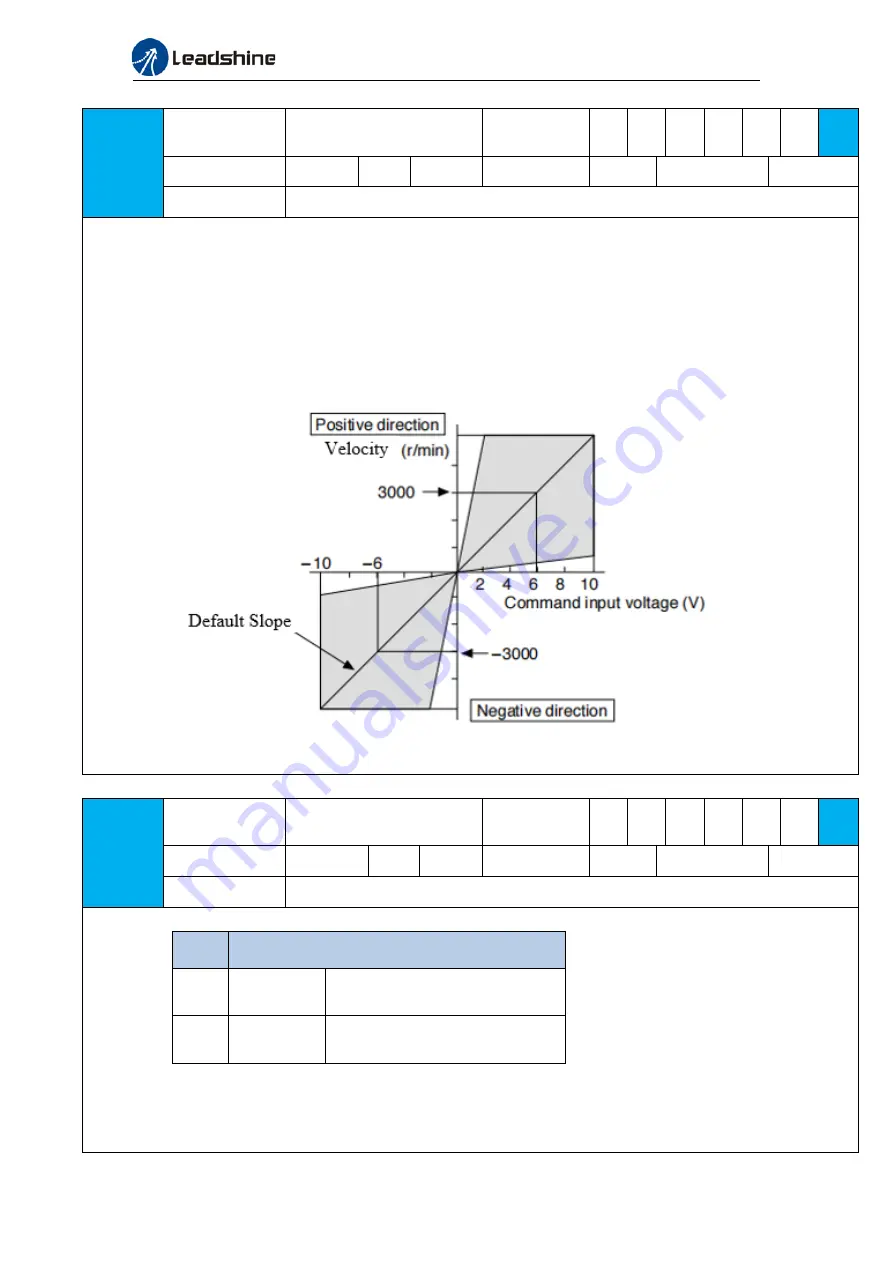
Set conversion gain from voltage applied to the analog velocity command (SPR) to motor velocity
command.
• Use Pr3.02 to set the slope for relation between command input voltage and rotational velocity.
• Default is set to Pr3.02=500 [r/min] hence input of 6V is 3000 r/min.
Caution
1. Do not apply more than ±10 V to analog velocity command (SPR).
2. While in velocity control mode in combination with driver external position loop, position gain of the
driver will have changes. Vibration might occur if Pr3.02 is set too large.
Pr3.03
Label
Velocity command input
inversion
Mode
F
Range
0~1
Unit
-
Default
0
Index
2303h
Activation
Immediate
Specify the polarity of the voltage applied to the analog velocity command (SPR).
Set
value
Motor rotational direction
0
Non-reversa
l
“+Voltage”
→
“Positive direction”
“–Voltage”
→
“Negative direction”
1
Reversal
“+Voltage”
→
“Negative direction”
“–Voltage”
→
“Positive direction”
While servo driver is set on simulated velocity control and in combination with external positioning
device, motor might undergo abnormal behavior when velocity command signal polarity from
external positioning device doesn’t match the polarity set in Pr3.03







































































