





























User Manual Of EL7-EC** AC Servo
232
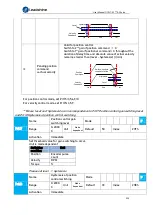
released or BRK_ON signal is given until actual holding brake is activated. It is
dependent on the holding brake of the motor.
*3: Deceleration time is determined by Pr6.14 or if motor speed goes below Pr4.39,
whichever comes first. BRK_OFF given after deceleration time.
*4: Pr4.37 set time value.
Delay time from the moment SRV_ON is given until BRK_OFF switch to BRK_ON, is
less than 500ms.
Pr4.39
Name
Holding brake activation speed Mode
F
Range
30~3000
Unit
RPM
Default 30
Index
2439h
Activation
Immediate
To set the activation speed for which holding brake will be activated.
When SRV-OFF signal is given, motor decelerates, after it reaches below Pr4.39 and Pr6.14 is not
yet reached, BRK_OFF is given.
BRK_OFF signal is determined by Pr6.14 or if motor speed goes below Pr4.39, whichever comes
first.
Application:
1. After disabling axis, Pr6.14 has been reached but motor speed is still above Pr4.39, BRK_OFF signal
given.
2. After disabling axis, Pr6.14 has not been reached but motor speed is below Pr4.39, BRK_OFF signal
given.
6.10.1 Emergency stop function
Emergency stop is used when an alarm occurs or a servo prohibition signal is received
when servo driver is enabled.
Method 1: Set up Pr4.43 to enable the function
Pr4.43
Name
Emergency stop function
Mode
F
Range
0~1
Unit
-
Default
0
Index
2443h
Activation
Immediate
0
:
Emergency stop is valid, servo driver will be forced to STOP and alarm occurs.
1
:
Emergency stop is invalid, servo driver will not be forced to STOP.
Pr5.04
Name
Driver prohibition input
settings
Mode
F
Range
0~2
Unit
—
Defaul
t
0 Index
2504h
Activation
Immediate
To set driver prohibition input (POT/NOT): If set to 1, no effect on homing mode.
Set value
Explanation
0
POT
Positive direction drive prohibited
NOT
Negative direction drive prohibited







































































