





























User Manual Of EL7-EC** AC Servo
224
To eliminate the instability of gain switching. Used in combination with Pr1.17 using the same unit.
If level< hysteresis, drive will set internally hysteresis = level.
Pr1.19
Name
Position gain switching
time
Mode
F
Range
0~10000 Unit
0.1ms Default
33
Index
2119h
Activation
Immediate
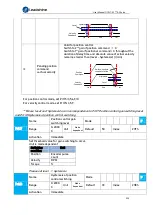
During position control, to ease torque changes and vibration due to rapid changes in position
loop gain, set suitable Pr1.19 value
For example: 1
st
(pr1.00) <-> 2nd (Pr1.05)
6.6 Feedforward gain
In position control, velocity feedforward is calculated by comparing the velocity control
command calculated internally and velocity command calculated from position feedback.
Comparing to control only using feedbacks, this will reduce position deviation and
increase responsiveness. Besides, by comparing the torque needed during motion from
velocity control command in comparison with velocity feedback, torque feedback can be
calculated to improve system responsiveness.
6.6.1 Velocity feedforward
Velocity feedforward can be used in position control mode. When the function is enabled,
it can increase velocity responsiveness, reduce position deviation during constant
velocity.
Pr1.10
Name
Velocity feed forward
gain
Mode
PP
HM
CS
P
Range
0~1000 Unit
0.10% Default
300
Index
2110h
Activation
Immediate
Used for decreasing following error caused by low responsiveness of velocity loop. Might cause
overshoot or increase in noise if set value is too high.
Pr1.11
Name
Velocity feed forward
filter time constant
Mode
PP
HM
CS
P







































































