




























User Manual Of EL7-EC** AC Servo
238
Read data from 6064h object dictionary
Please read data only when the motor is fully stopped or it might cause calculation
errors. Please repeat this step for at least twice to make sure the result is uniform.
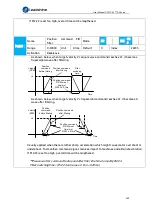
Multiturn rotational mode
For absolute encoder, multiturn rotational mode (Pr0.15 = 2, Pr6.63 set to multiturn
upper limit) is added on top of incremental mode and multiturn linear mode. Actual
feedback multiturn data is always between 0 – [Pr6.63 + 1], regardless of the
direction of rotation. There is no limit to no. of rotation and no data overflow.
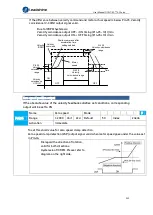
Single turn absolute mode
Use this mode when the travel distance of the axis is within a single turn of the rotor.
1. Target position input range – EtherCAT
When using 23-bit absolute encoder, under single turn absolute mode, electronic
gear ratio =1:1
Homing point offset 607Ch = 0, target position range = 0 – [2
23
-1]
Axis is homed, target position range = 607Ch – [2
23
-1+607Ch]







































































