




























User Manual Of EL7-EC** AC Servo
236
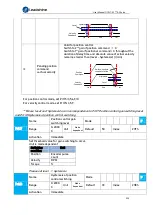
The result of suppressing low frequency resonance
激光测试仪测
试末端振动
End low
frequency
suppression
End vibration is
measured using laser
measurement device
End vibration is
measured using laser
measurement device
Actual
velocity
Actual
velocity
6.12 Multiturn absolute encoder
Multiturn absolute encoder records the position and the revolution counts of the
motor. When driver is powered-off, multiturn absolute encoder will backed up the data
using battery and after powering on, the data will be used to calculated absolute
mechanical position and there is no need for a mechanical homing process. Use widely
in robotic arms and CNC machines.
If it is the first time using the encoder, please home the mechanical axis and
initialize the absolute position of the encoder to zero. Set up a homing point and only
home when there is an alarm. Please stop the axis before reading any position data to
prevent inaccuracy.
6.12.1 Parameters setting
Pr0.15
Name
Absolute Encoder settings Mode
PP
HM
CS
P
Range
0~32767 Unit
-
Default
0
Index
2015h
Activation
Immediate
0: Incremental mode:
Used as an incremental encoder. Doesn’t retain position data on power off. Unlimited travel
distance.
1: Multiturn linear mode:
Used as a multiturn absolute encoder. Retrain position data on power off. For applications
with fixed travel distance and no multiturn data overflow.
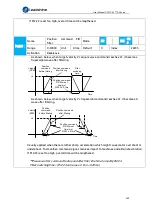
2: Multiturn rotary mode:
Used as a multiturn absolute encoder. Retrain position data on power off. Actual data
feedback in between 0-(Pr6.63). Unlimited travel distance.
3: Single turn absolute mode:
Used when travel distance is within 1 revolution of the encoder. Data overflow will trigger
alarm.
5: Clear multiturn alarm and activate multiturn absolute function. Will switch to multiturn mode
once alarm cleared, if remains at 5 after 3s, please solve according to Er153.
9: Clear multiturn position, reset multiturn alarm and activate multiturn absolute function. Will







































































