




























User Manual Of EL7-EC** AC Servo
68
Pr0.12
Label
Pulse output logic
inversion
Mode
F
Range
0~1
Uni
t
-
Default
0
Index
2012
Activation
After restart
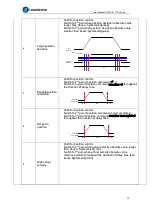
To set phase B logic and output source from encoder pulse output.
Pulse output logic inversion
Pr0.12 Phase B logic
CW direction
CCW direction
[0]
Not inverted
[1]
Inverted
Pr0.13
Label
1
st
Torque Limit
Mode
F
Range
0~500
Unit
%
Default
300
Index
2013h
Activation
Immediate
1
st
torque limit is set according to ratio percentage of motor rated current. Do not exceed max
driver output current.
Actual torque limit is the smaller value of Pr0.13 and object dictionary 6072
Pr0.14
Label
Excessive Position
Deviation Settings
Mode
PP
HM
CS
P
Range
0~500
Unit
0.1rev Default
30
Index
2014h
Activation
Immediate
Please set threshold value for position deviation accordingly. Default factory setting = 30, Er180
will be triggered if positive deviation is in excess of 3 revolutions.
Pr0.15
Label
Absolute Encoder settings Mode
PP
HM
CS
P
Range
0~32767 Unit
-
Default
0
Index
2015h
Activation
Immediate
0: Incremental mode:
Used as an incremental encoder. Doesn’t retain position data on power off. Unlimited travel
distance.
1: Multiturn linear mode:
Used as a multiturn absolute encoder. Retrain position data on power off. For applications
with fixed travel distance and no multiturn data overflow.
2: Multiturn rotary mode:
Used as a multiturn absolute encoder. Retrain position data on power off. Actual data
feedback in between 0-(Pr6.63). Unlimited travel distance.
3: Single turn absolute mode:
Used when travel distance is within 1 revolution of the encoder. Data overflow will trigger
alarm.







































































