



























User Manual Of EL7-EC** AC Servo
237
switch to multiturn mode once alarm cleared, if remains at 9 after 3s, please solve according
to Er153. Please disable axis before setting to 9 and home the axis before using.
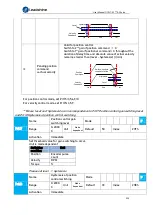
6.12.2 Read absolute position
1
、
Steps
:
1) First, select a motor with multiturn absolute encoder, install battery and confirm
whether the driver version supports the specific motor;
2) Set Pr0.15 = 1. If it is the first time of installation, Err153 will occur because battery is
newly installed and position data is invalid.
Please home the axis and initialize the absolute
position of the encoder to zero.
3) When absolute homing point is set and there is no fault with the battery, the alarm
will be cleared
4) Finally, the user can read the absolute position. Position won’t be lost even if the
driver is powered off.
确认是多圈编码
器并安装电池
设定参数
PA0.15
为
1
原点是否
已初始化
把机械回到原点,
PA0.15
设
9
执行多
圈位置清零
读取绝对位置
YES
NO*
*
注:新安装编码器没初始化,会报警。
Install battery
Set
Pr0.15=1
Home process
Finishing
Homing process
,
set Pr0.15=9
Read absolute
position
YES
NO*
*Note
:
The newly installed encoder is not
initialized and will alarm
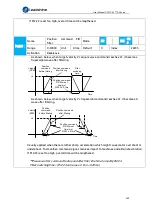
2
、
Read absolute position
When the rotor turns in clockwise direction, the revolution count will be negative;
turns in counter clockwise direction, the count will be positive. No. of revolutions will be
from -32767 to +32767. If the count number r32767 in counter clockwise
direction, the count will revert back to -32768, -32767 and vice versa for clockwise
direction.
As for position data, it depends on the precision of the encoder. For 17 bit = 0-131071,
23 bit = 0-8388607