




























User Manual Of EL7-EC** AC Servo
230
13
Pr1.12
Torque feedforward gain
14
Pr1.13
Torque feedforward filter time constant
15
Pr1.15
Position control gain switching mode
16
Pr1.17
Position control switching level
17
Pr1.18
Position control switching hysteresis
18
Pr1.19
Position gain switching time
1
st
and 2
nd
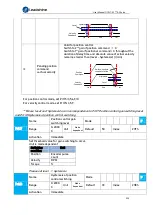
gain initial values are obtained by automatic gain adjustment
No.
Parameter
Label
1
PA1.00
1
st
position loop gain
2
PA1.01
1
st
velocity loop gain
3
PA1.02
1
st
velocity integral time constant
4
PA1.03
1
st
velocity detection filter
5
PA1.04
1
st
torque filter time constant
6
PA1.05
2
nd
position loop gain
7
PA1.06
2
nd
velocity loop gain
8
PA1.07
2
nd
velocity integral time constant
9
PA1.08
2
nd
velocity detection filter
10
PA1.09
2
nd
torque filter time constant
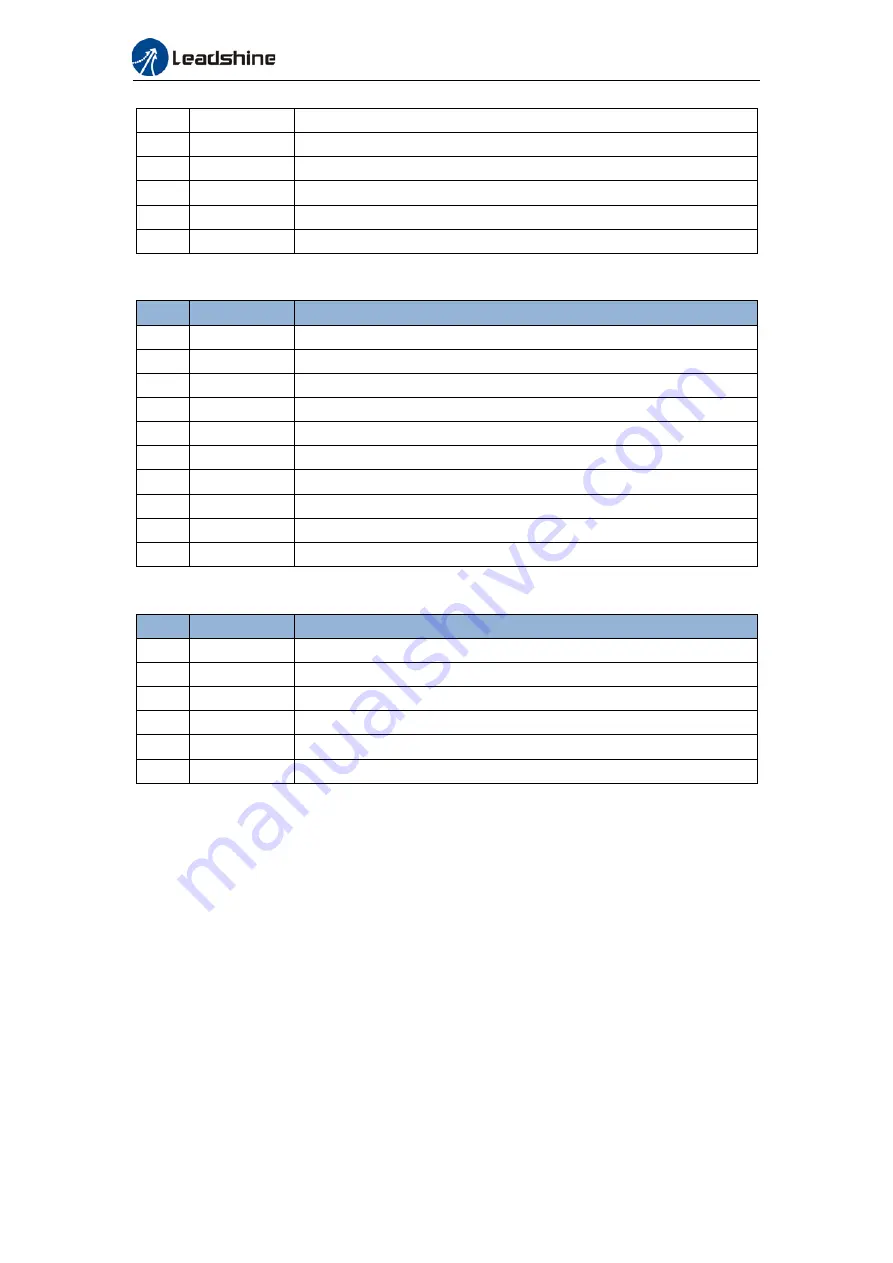
Manually adjusted gain parameters
No.
Parameter
Label
1
PA1.00
1
st
position loop gain
2
PA1.01
1
st
velocity loop gain
3
PA1.02
1
st
velocity integral time constant
4
PA1.04
1
st
torque filter time constant
5
PA1.10
Velocity feedforward gain constant
6
PA1.11
Velocity feedforward filter time constant
6.9.2 Velocity control mode
Velocity control mode parameters adjustment is pretty similar to position control mode.
Except for position loop gain Pr1.00 and Pr1.05, velocity feedforward gain (Pr1.10)
6.9.3 Torque control mode
Parameters adjustment for torque control mode has to be differentiate into 2 conditions:
1.
When actual velocity reaches velocity limit, adjustment will be as per velocity
control mode. Motor will switch from torque control to velocity limit as velocity
control.







































































