





























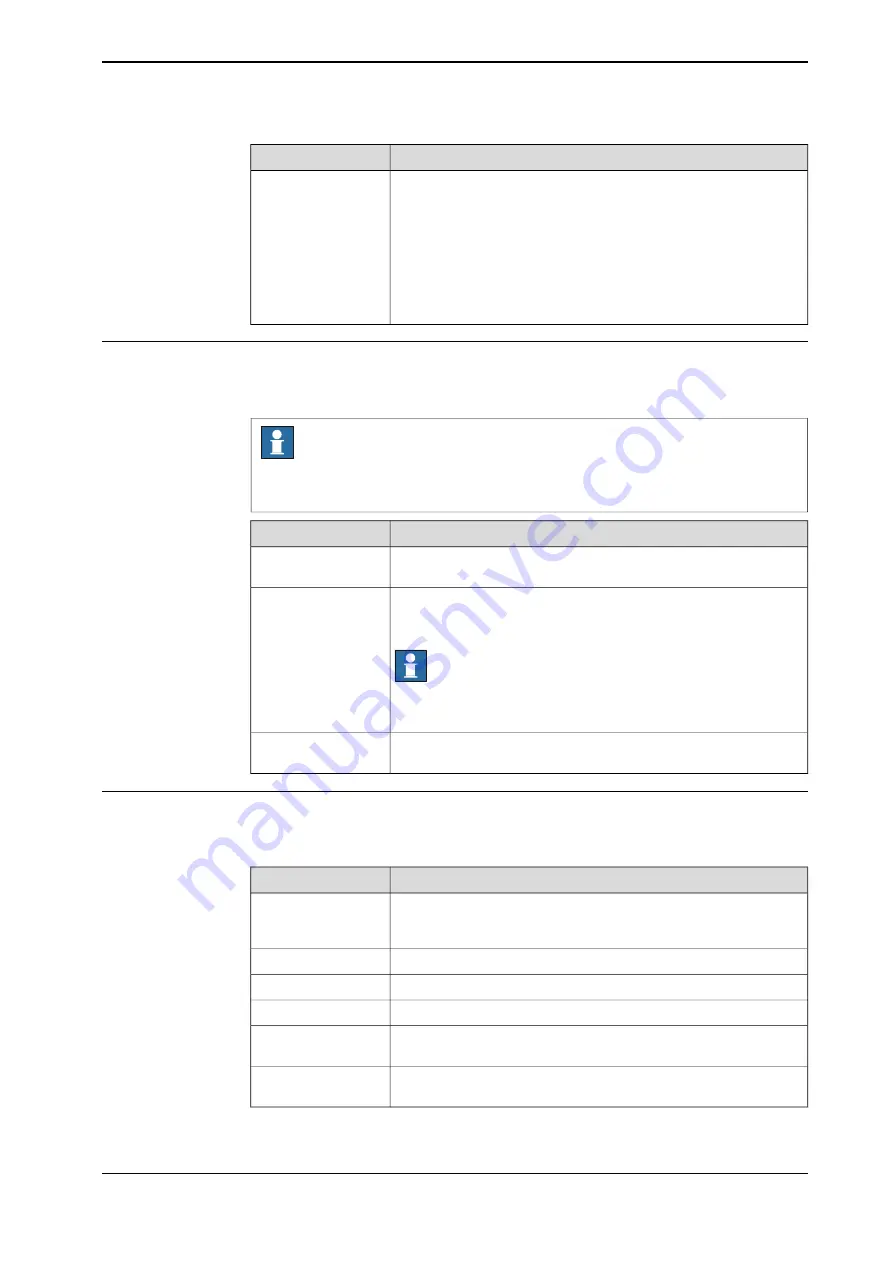
Description
Setting
•
Category0Stop
- Stop by immediate removal of power to the
actuators. Mechanical brakes are applied.
A robot that is stopped with a category 0 stop does not follow
its programmed path while decelerating.
•
Category1Stop
- Controlled stop with power available to the
actuators to achieve the stop. Power is removed from the
actuators when the stop is achieved.
A robot that is stopped with a category 1 stop follows its
programmed path while decelerating.
Settings
•
Stop category
The General Output button
The
General Output
button is used to configure the external power output, see
Configuring the general output on page 168
Note
General Output
is a customer adaption option that requires additional cabling
to the Safety module.
Description
Setting
Specifies the safety signal that activates external power output.
Settings
•
Signal
When using this selection the safe discrete output is set based on
the signal in automatic mode, but will follow the enabling device in
manual mode (regardless of the signal value).
Note
The selection
Follow enabling device in manual mode
corresponds
to the old behavior of the
External Power Supply
button.
Signal behavior
•
Follow en-
abling device
in manual
mode
The safety signal always controls the output in any operating mode.
Signal behavior
•
Always
The Cyclic Brake Check button
The
Cyclic Brake Check
button is used to setup the cyclic brake check function.
For more information, see
Cyclic Brake Check guidelines on page 200
.
Description
Setting
If this checkbox is selected, the robot will not stop if a cyclic brake
check has not been performed on time. Only a warning will be written
to the event log and presented on the FlexPendant.
Warning only, no
stop
The maximum allowed time between cyclic brake checks.
Max CBC test interval
The warning time before a cyclic brake check must be performed.
Pre warning time
The maximum allowed movement during a cyclic brake check.
Standstill tolerance
The minimum servo lag used for detecting that the cyclic brake
check is performed.
Supervision
threshold
If a checkbox is deactivated, then cyclic brake check is deactivated
for that joint.
ROB1
Application manual - Functional safety and SafeMove2
83
3HAC052610-001 Revision: P
© Copyright 2016-2020 ABB. All rights reserved.
4 The Visual SafeMove user interface in RobotStudio
4.3.2 Adding SafeMove functions
Continued
Содержание SafeMove2
Страница 1: ...ROBOTICS Application manual Functional safety and SafeMove2 ...
Страница 2: ...Trace back information Workspace 20C version a3 Checked in 2020 09 14 Skribenta version 5 3 075 ...
Страница 8: ...This page is intentionally left blank ...
Страница 16: ...This page is intentionally left blank ...
Страница 34: ...This page is intentionally left blank ...
Страница 56: ...This page is intentionally left blank ...
Страница 72: ...This page is intentionally left blank ...
Страница 112: ...This page is intentionally left blank ...
Страница 194: ...This page is intentionally left blank ...
Страница 196: ...This page is intentionally left blank ...
Страница 234: ...This page is intentionally left blank ...
Страница 237: ......