





























6.12 Configure the zones
Creating a zone
DANGER
When setting zone limits, brake distances must be taken into consideration, so
that the SafeMove functions are configured with enough margin. If the robot hits
the zone limit, it starts to brake and needs the brake distance to stop. This occurs
outside the allowed zone.
Note that if the robot starts accelerating strongly just before reaching a configured
zone limit, there will occur a speed overshoot before decelerating. This may
result in a somewhat increased speed and extended braking distance compared
to a smoother speed situation.
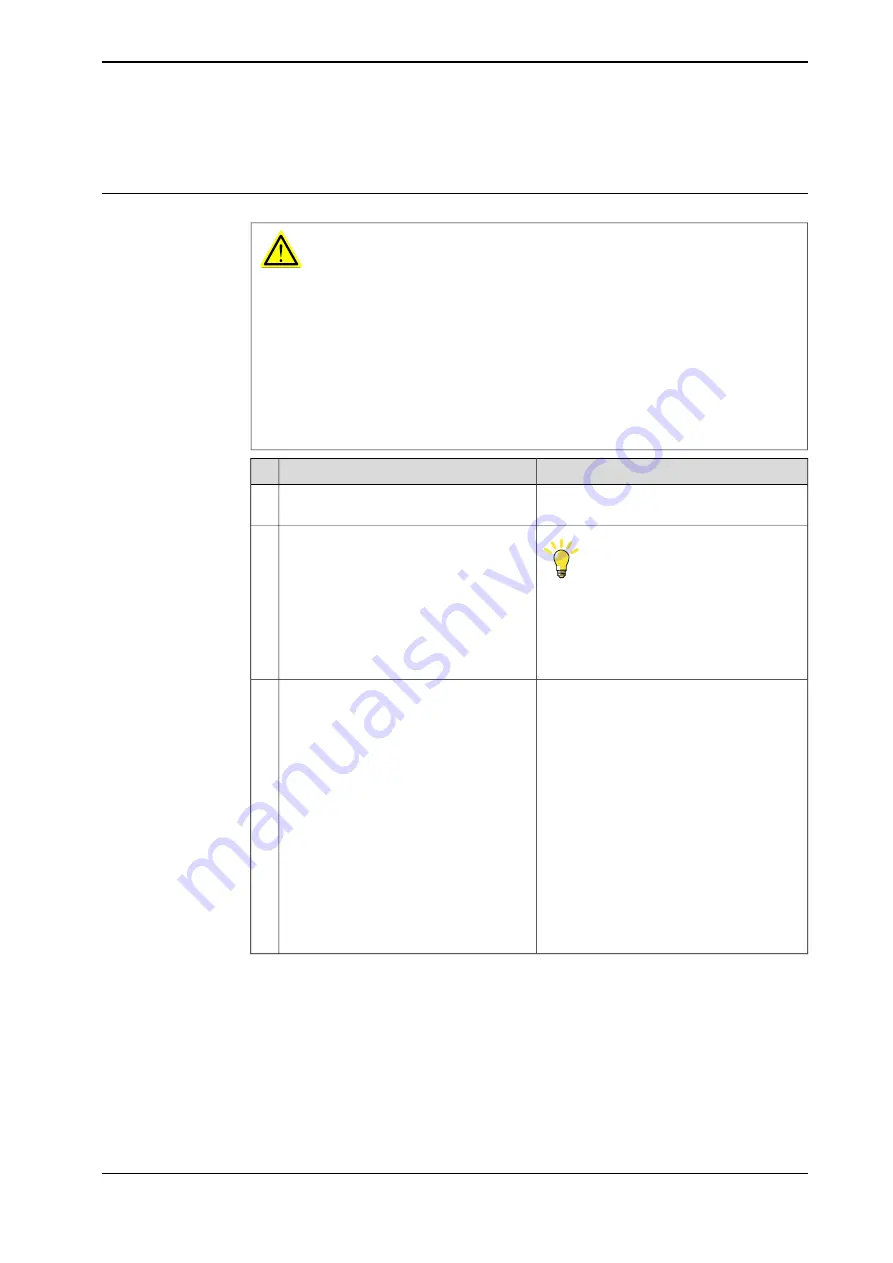
Note/illustration
Action
A zone of default size is shown in the
graphics window.
In the
Visual SafeMove
ribbon, click on
Safe Zone
.
1
Tip
If there is a small zone with higher allowed
speed (e.g. 1000 mm/s) inside a larger zone
with lower allowed speed (e.g. 250 mm/s),
use higher priority for the small zone.
Specify
Tool Speed Supervision Priority
for the zone.
If two zones are overlapping, the zone
with the highest priority will set the speed
limits for the overlapping space.
If two overlapping zones have the same
priority, the most restrictive values will be
used in the overlapping space (lowest
max speed and highest min speed).
2
If you want to state the coordinates in anoth-
er coordinate system, select it in the field
Reference
.
Fill in the height of the box and the X and
Y values for each corner.
3
If the zone base should have another shape
than square, add a corner point by clicking
on a
+
button. For example, to add a new
point between point 2 and 3, click on the
+
button at point 2.
An alternative to writing coordinates in the
Visual SafeMove Properties
browser, is to
click and drag on the corners or sides. By
pressing the key X while dragging, the
dragging is done along the X-axis while the
Y value remains unchanged. By pressing
the key Y while dragging, the dragging is
done along the Y-axis while the X value re-
mains unchanged.
Continues on next page
Application manual - Functional safety and SafeMove2
155
3HAC052610-001 Revision: P
© Copyright 2016-2020 ABB. All rights reserved.
6 Configuring SafeMove
6.12 Configure the zones
Содержание SafeMove2
Страница 1: ...ROBOTICS Application manual Functional safety and SafeMove2 ...
Страница 2: ...Trace back information Workspace 20C version a3 Checked in 2020 09 14 Skribenta version 5 3 075 ...
Страница 8: ...This page is intentionally left blank ...
Страница 16: ...This page is intentionally left blank ...
Страница 34: ...This page is intentionally left blank ...
Страница 56: ...This page is intentionally left blank ...
Страница 72: ...This page is intentionally left blank ...
Страница 112: ...This page is intentionally left blank ...
Страница 194: ...This page is intentionally left blank ...
Страница 196: ...This page is intentionally left blank ...
Страница 234: ...This page is intentionally left blank ...
Страница 237: ......