





























6 Configuring SafeMove
6.1 Recommended working procedure
General
This section describes the recommended working procedure when configuring
SafeMove for the first time. The working procedure helps to understand the
dependencies between the different steps. A good approach when creating a new
configuration is to start with the basic functionality. When that works as expected,
expand the application.
A prerequisite is that all steps in the hardware and software installation procedures
must have been performed, see chapter
For more information on what can be done with the configuration tool, see chapter
The Visual SafeMove user interface in RobotStudio on page 73
Note
Some functionality is only available for SafeMove Pro, see
Basic steps
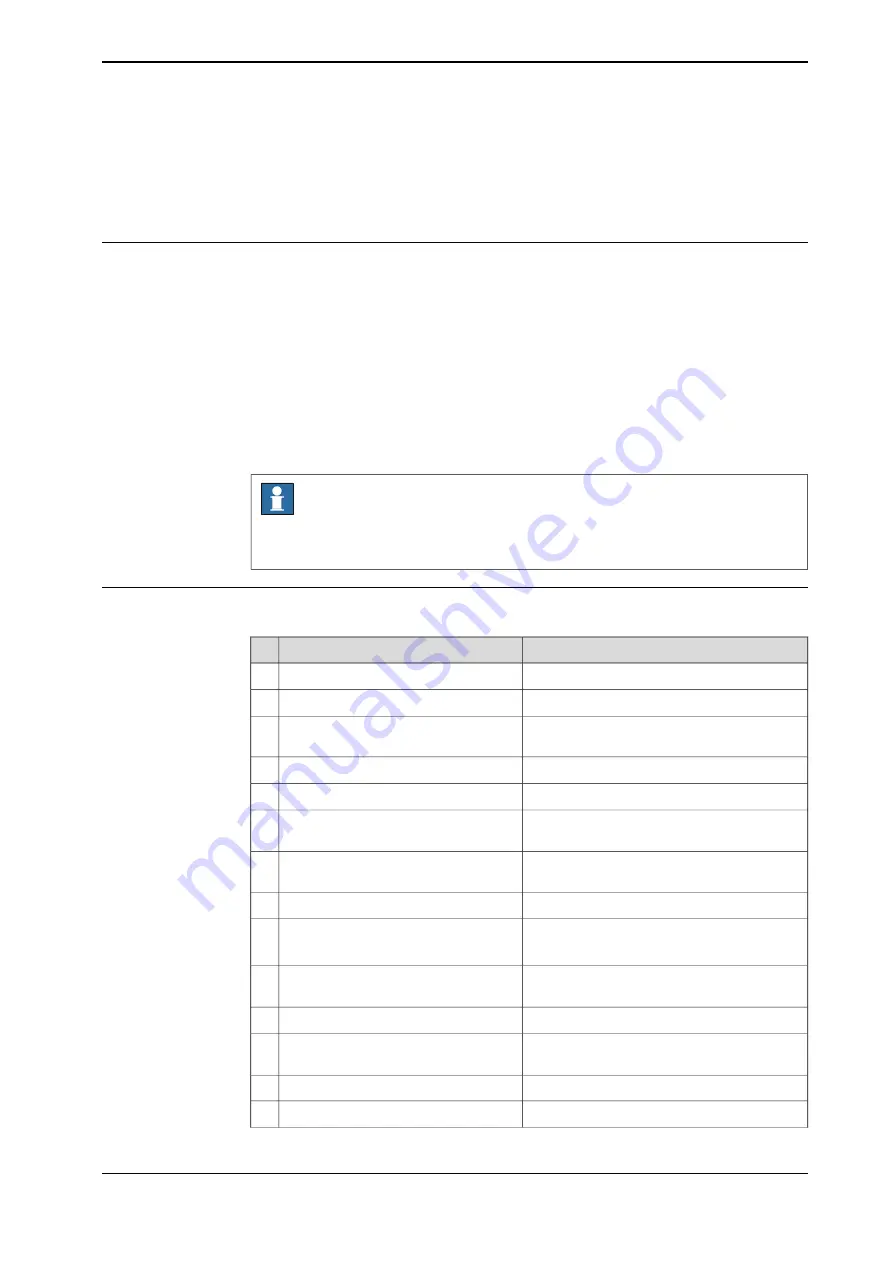
Use this procedure when configuring SafeMove.
See
Action
Make some initial preparations.
1
Configure system parameters on page 140
Configure system parameters.
2
Application manual - PROFINET Control-
ler/Device
Set the input and output size and name
of the PROFINET internal device.
3
Set up safety user grants on page 141
Set up safety user grants.
4
Configure the robot on page 145
Configure robot properties.
5
Configure the synchronization position on
page 148
Configure the synchronization position.
6
Configure the tools on page 149
Configure the SafeMove tool defini-
tions.
7
Configure safe I/O on page 152
Configure safe I/O signals.
8
Configure the zones on page 155
Configure zones and/or ranges.
9
Configure the ranges on page 157
Configure the supervision functions on
page 160
Configure the supervision functions.
10
Configure other functions on page 168
Configure other functions.
11
Load the configuration to the safety controller
on page 171
Load the configuration to the safety
controller.
12
Restart the robot controller.
13
Validate the configuration on page 173
Validate the configuration.
14
Continues on next page
Application manual - Functional safety and SafeMove2
137
3HAC052610-001 Revision: P
© Copyright 2016-2020 ABB. All rights reserved.
6 Configuring SafeMove
6.1 Recommended working procedure
Содержание SafeMove2
Страница 1: ...ROBOTICS Application manual Functional safety and SafeMove2 ...
Страница 2: ...Trace back information Workspace 20C version a3 Checked in 2020 09 14 Skribenta version 5 3 075 ...
Страница 8: ...This page is intentionally left blank ...
Страница 16: ...This page is intentionally left blank ...
Страница 34: ...This page is intentionally left blank ...
Страница 56: ...This page is intentionally left blank ...
Страница 72: ...This page is intentionally left blank ...
Страница 112: ...This page is intentionally left blank ...
Страница 194: ...This page is intentionally left blank ...
Страница 196: ...This page is intentionally left blank ...
Страница 234: ...This page is intentionally left blank ...
Страница 237: ......