



























15. USING A LINEAR SERVO MOTOR
15 - 18
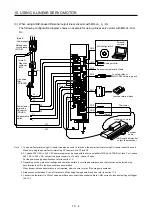
POINT
To execute a home position return securely, start a home position return after
moving the linear servo motor to the opposite stroke end with JOG operation
and others.
Change the third digit value of [Pr. PL01] according to the linear encoder
resolution.
(c) Caution for passing the home position (reference mark)
An interval for turning on home position (reference mark) signal of the linear encoder has a certain
width. (Specifications differ depending on the linear encoders. For details, refer to "Linear Encoder
Instruction Manual".)
Example: When Z-phase is recognized at startup
Home position signal
B
A
B is recognized as
the on position.
A is recognized as
the on position.
The position which turns on LZ (Encoder Z-phase pulse) differs depending on the directions of home
position passing. When you need to set the home position return completion to the same position
each time such as dog type home position return, always start home position return with the same
direction.
(d) Caution for linear encoder which does not have the home position (reference mark)
The linear encoder which does not have the home position (reference mark), LZ (Encoder Z-phase
pulse) of the servo amplifier does not be outputted. It is depending on positioning controllers to use
whether LZ (Encoder Z-phase pulse) is necessary or not for home position return. Check the
specifications of controllers.
(2) Absolute position linear encoder
The home position reference position using an absolute type linear encoder will be per 1048576 pulses
based on the linear encoder home position (absolute position data = 0). You can change the stop
interval at home position return with the third digit of [Pr. PL01].
[Pr. PL01]
Stop interval setting at the home position return
Setting
value
Stop interval [pulse]
0
8192
1
131072
2
262144
3
1048576 (initial value)
4
4194304
5
16777216
6
67108864
Summary of Contents for MR-J4-100A
Page 9: ...A 8 MEMO ...
Page 61: ...1 FUNCTIONS AND CONFIGURATION 1 44 MEMO ...
Page 67: ...2 INSTALLATION 2 6 MEMO ...
Page 137: ...3 SIGNALS AND WIRING 3 70 MEMO ...
Page 261: ...6 NORMAL GAIN ADJUSTMENT 6 24 MEMO ...
Page 291: ...7 SPECIAL ADJUSTMENT FUNCTIONS 7 30 MEMO ...
Page 299: ...8 TROUBLESHOOTING 8 8 MEMO ...
Page 319: ...9 OUTLINE DRAWINGS 9 20 MEMO ...
Page 461: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 36 MEMO ...
Page 511: ...14 COMMUNICATION FUNCTION 14 38 MEMO ...
Page 559: ...16 USING A DIRECT DRIVE MOTOR 16 20 MEMO ...
Page 583: ...17 FULLY CLOSED LOOP SYSTEM 17 24 MEMO ...
Page 621: ...APPENDIX App 38 ...
Page 639: ......