





























1 SERVO PARAMETER DETAILS
1.4 Extension setting servo parameters group ([Pr. PC_ _ ])
79
1
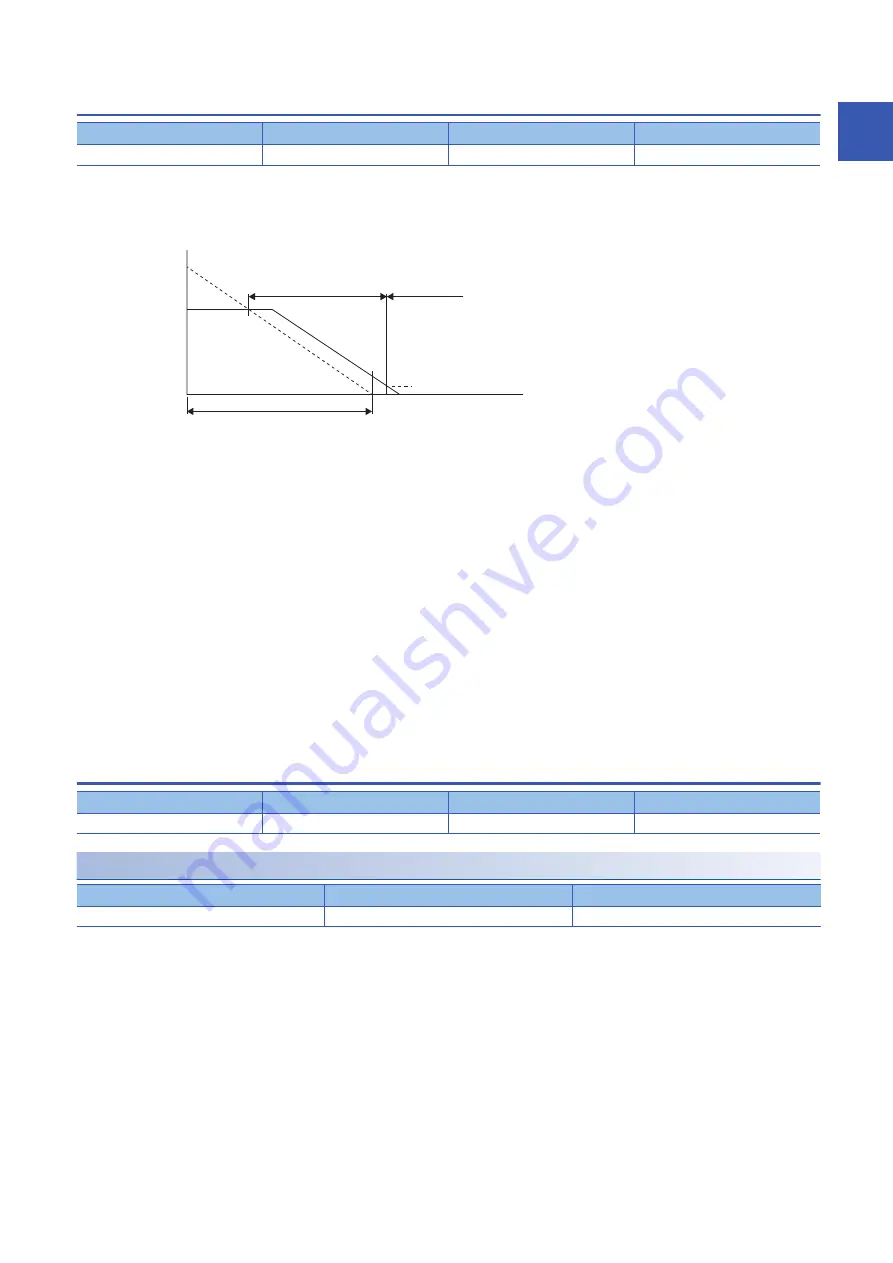
[Pr. PC24_Deceleration time constant at forced stop (RSBR)]
Set the deceleration time constant for the forced stop deceleration function.
Set the time taken from the rated speed to 0 [r/min] (0 [mm/s]) in units of ms.
When "0" is set, the deceleration time constant is the same as when "100" is set.
This servo parameter corresponds to [Quick stop deceleration (Obj. 6085h)]. When the object is mapped to the cyclic
communication, do not write values with engineering tools because the controller overwrites the servo parameter values
written with engineering tools.
This servo parameter is enabled when [Pr. PT01.1 Speed/acceleration/deceleration unit selection] is set to "0". This servo
parameter and [Pr. PV09 Deceleration at forced stop] are mutually exclusive.
• If the servo motor torque or thrust is saturated at the maximum value during forced stop deceleration because the set time
is too short, the time to stop the servo motor will be longer than the set time constant.
• [AL. 050 Overload 1] or [AL. 051 Overload 2] may occur during forced stop deceleration, depending on the set value.
• After an occurrence of an alarm to execute forced stop deceleration, if another alarm that does not execute forced stop
deceleration occurs, or if the control circuit power supply is shut off, dynamic braking will start regardless of the deceleration
time constant setting.
• Set a longer time than deceleration time at quick stop of the controller. If the setting time is too short, [AL. 052 Excessive
error] may occur.
• During forced stop deceleration, changes in the setting value are not reflected. If the setting value is changed during forced
stop deceleration, the change will be reflected after the deceleration is completed.
[Pr. PC26_Function selection C-8 (**COP8)]
[Pr. PC26.3_Load-side encoder cable communication method selection]
0: Two-wire type
1: Four-wire type
When using a load-side encoder that is A/B/Z-phase differential output type, set "0". Setting "1" triggers [AL. 037 Parameter
error].
If the value is set incorrectly, [AL. 070 Load-side encoder initial communication error 1] or [AL. 071 Load-side encoder normal
communication error 1] occurs.
Setting "1" on servo amplifiers other than the MR-J5-_G_-RJ and MR-J5D1-_G_ triggers [AL. 037].
Initial value
Setting range
Setting method
Ver.
100 [ms]
0 to 20000
Each axis
A0
Initial value
Setting range
Setting method
Ver.
00000050h
Refer to the relevant detail No.
Each axis
Refer to the relevant detail No.
Initial value
Setting range
Ver.
0h
Refer to the text
A0
[Pr. PC24]
Forced stop deceleration
Servo motor speed
Rated speed
Dynamic brake deceleration
Zero speed






































































