





























24
1 SERVO PARAMETER DETAILS
1.2 Basic setting servo parameters group ([Pr. PA_ _ ])
[Pr. PA10_In-position range (INP)]
Set the in-position range in the command pulse unit.
With the setting of [Pr. PC06.0 In-position range unit selection], the unit can be changed to the servo motor encoder pulse
unit.
• In-position range setting
*1 Available on servo amplifiers with firmware version B8 or later.
• Selecting an encoder for in-position range control
• In-position range unit
*1 The command unit can be changed to 0.001 mm, 0.0001 inch, 0.001 degree or pulses with [Pr. PT01.2 Unit for position data].
[Pr. PA11_Forward rotation torque limit (TLP)]
The torque or thrust generated by the servo motor can be limited.
Set this servo parameter in relation to the rated torque or continuous thrust (= 100.0 %). Set the servo parameter when
limiting the torque of the servo motor for CCW power running or CW regeneration, or when limiting the thrust of the linear
servo motor for positive direction power running or negative direction regeneration. If this servo parameter is set to "0.0", the
servo motor does not generate torque or thrust.
The polarity of the torque limit can be changed with the setting values of [Pr. PA14 Travel direction selection] and [Pr. PC29.3
Torque POL reflection selection].
This parameter corresponds to [Positive torque limit value (Obj. 60E0h)]. When the object is mapped to the cyclic
communication, do not write values with engineering tools because the controller overwrites the servo parameter values
written with engineering tools.
Depending on the settings in [Pr. PC29.3] and [Pr. PA14], the corresponding object changes to [Negative torque limit value
(Obj. 60E1h)].
If a value larger than the maximum torque or maximum thrust of the servo motor is set, the value will be limited to the
maximum torque or maximum thrust of the servo motor.
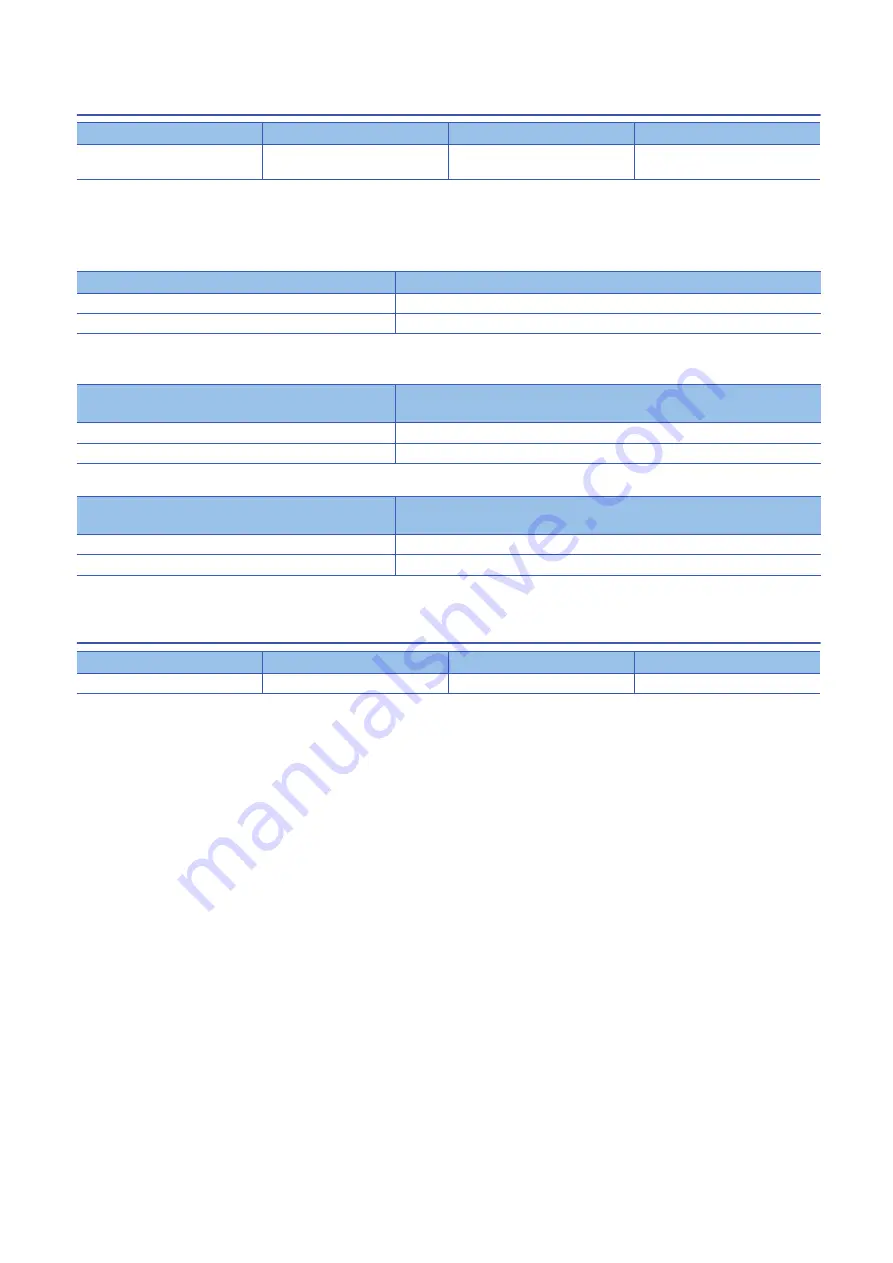
Initial value
Setting range
Setting method
Ver.
25600 [Refer to the text below for the
unit.]
0 to 16777215
Each axis
A0
Control mode
In-position setting range
Profile mode/Cyclic synchronous mode
Range where in-position (INP) is output
Positioning mode (point table method)
Range where MEND (traveling completion) and INP (in-position) are output
[Pr. PA01.4 Fully closed loop operation mode
selection] setting value
In-position range unit
0 (semi closed loop control mode)
Command resolution unit (motor-side encoder)
1 (fully closed loop control mode)
Command resolution unit (load-side encoder)
[Pr. PC06.0 In-position range unit selection] setting
value
Unit
0 (command unit)
Position command unit
1 (servo motor encoder pulse unit)
pulse
Initial value
Setting range
Setting method
Ver.
1000.0 [%]
0.0 to 1000.0
Each axis
A0







































































