





























22
1 SERVO PARAMETER DETAILS
1.2 Basic setting servo parameters group ([Pr. PA_ _ ])
[Pr. PA08.4_Quick tuning - Load to motor inertia ratio setting]
Set the load to motor inertia ratio at quick tuning. If the load connected to the servo motor is larger than the load to motor
inertia ratio set in the servo parameter, an overshoot may occur in positioning operation after quick tuning.
0: Load to motor inertia ratio of 30 times or less
1: Load to motor inertia ratio of 100 times or less
[Pr. PA08.5_Quick tuning - Execution selection]
Set when to execute quick tuning.
0: At initial servo-on after cycling the power
1: At every servo-on
[Pr. PA08.6_Quick tuning - Restore selection]
Set whether to return servo parameters to the values from before quick tuning.
0: Disabled
1: Enabled
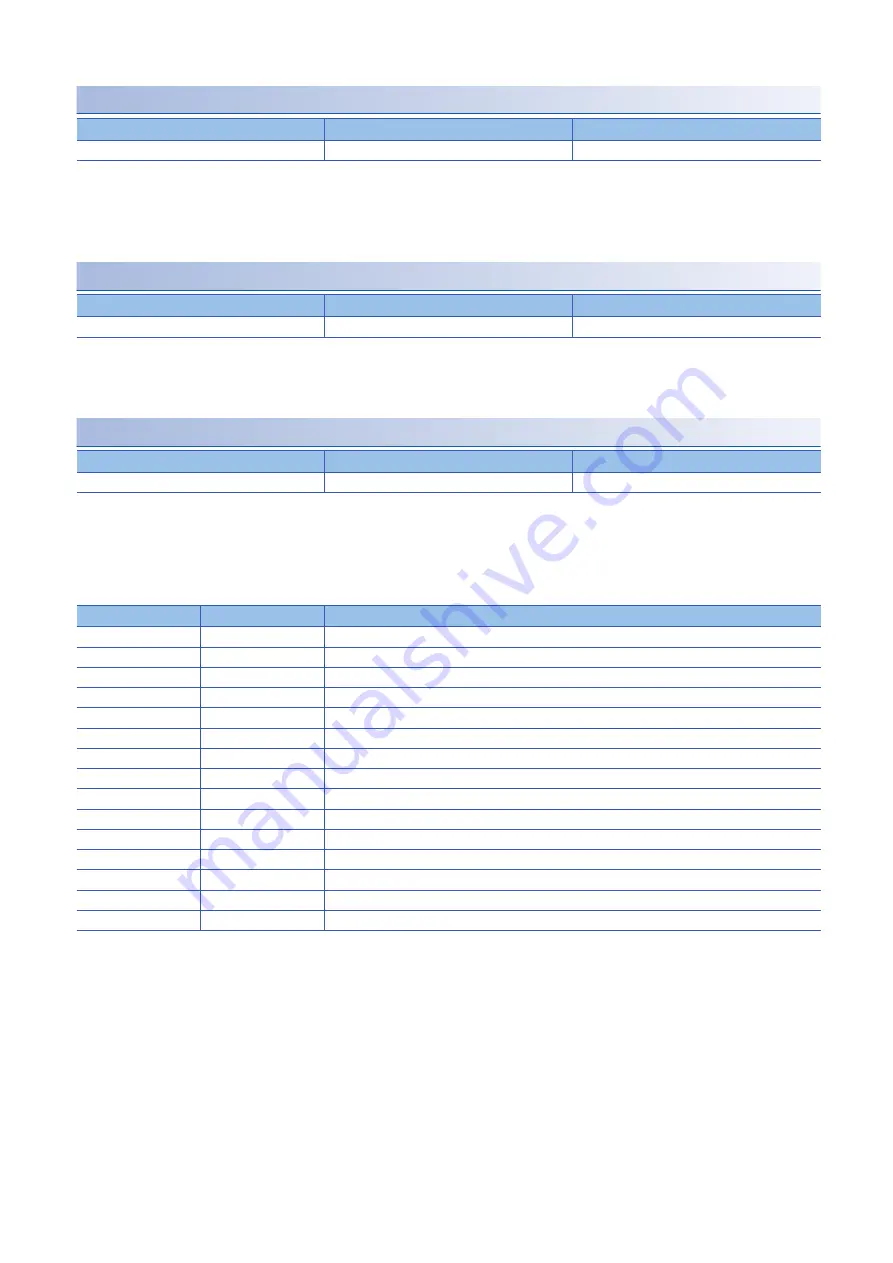
By setting "1" (enabled), the following servo parameters return to the values from before quick tuning. If quick tuning has
never been performed after power on or software reset, setting "1" (enabled) only keeps the current servo parameter values.
Initial value
Setting range
Ver.
0h
Refer to the text
A0
Initial value
Setting range
Ver.
0h
Refer to the text
A0
Initial value
Setting range
Ver.
0h
Refer to the text
A0
No.
Symbol
Name
PB01
FILT
Adaptive tuning mode (adaptive filter II)
PB07
PG1
Model control gain
PB08
PG2
Position control gain
PB09
VG2
Speed control gain
PB10
VIC
Speed integral compensation
PB11
VDC
Speed differential compensation
PB13
NH1
Machine resonance suppression filter 1
PB14
NHQ1
Notch shape selection 1
PB15
NH2
Machine resonance suppression filter 2
PB16
NHQ2
Notch shape selection 2
PB18
LPF
Low-pass filter setting
PB23
VFBF
Low-pass filter selection
PB50
NH5
Machine resonance suppression filter 5
PB51
NHQ5
Notch shape selection 5
PE41
EOP3
Function selection E-3







































































