





























1 SERVO PARAMETER DETAILS
1.9 Positioning control setting servo parameters group ([Pr. PT_ _ ])
171
1
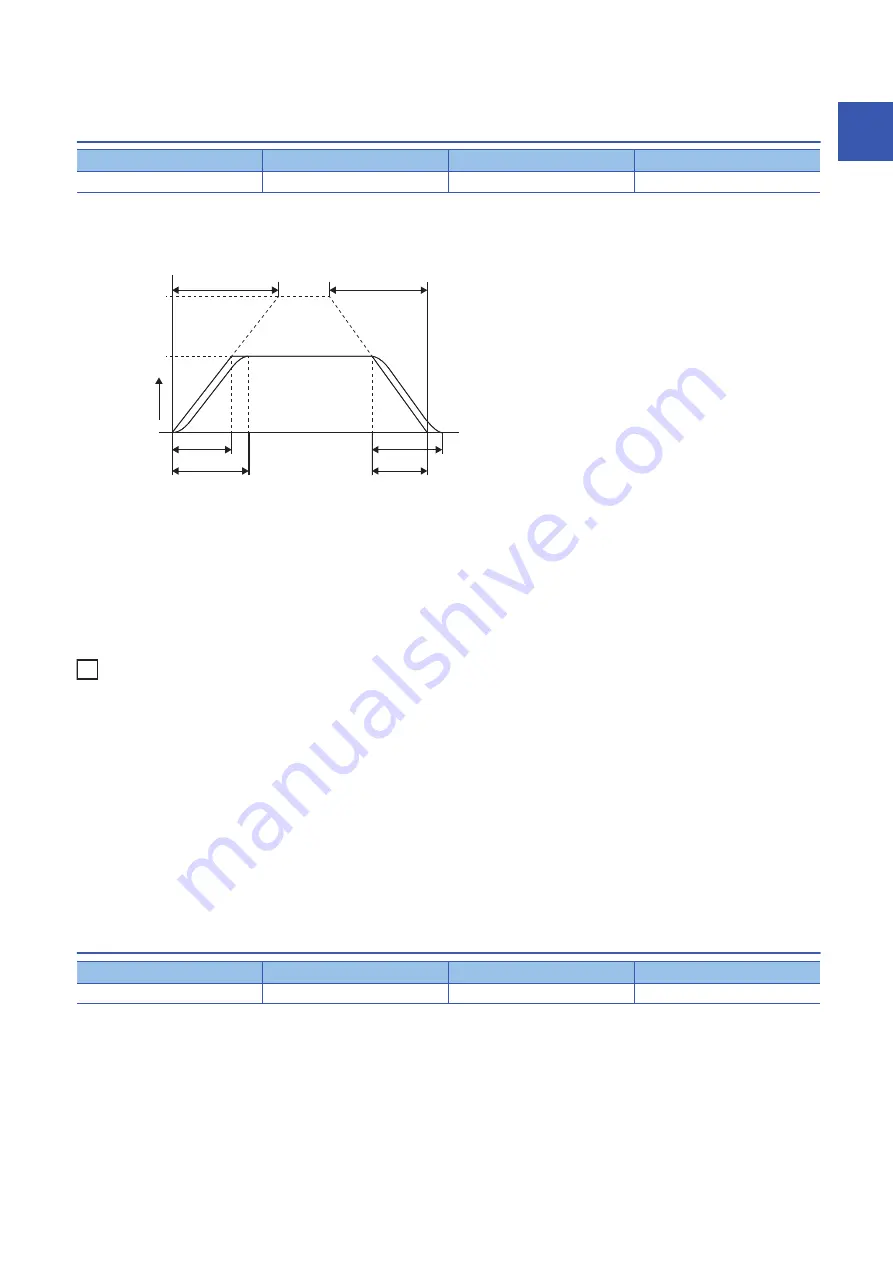
[Pr. PT51_S-pattern acceleration/deceleration time constants
(STC)]
Set the time of the arc part for S-pattern acceleration/deceleration time constants.
This setting enables smooth start/stop of the servo motor.
When "0" is set, linear acceleration/deceleration is performed.
This function is enabled in the profile position mode, profile velocity mode, and positioning mode (point table method).
This function is disabled during homing.
In the profile velocity mode, if a long acceleration or deceleration time is set, a timing error may occur on the arc part against
the setting of the S-pattern acceleration deceleration time constants.
The upper limit of the actual time for the arc part is limited to 2000000/acceleration time during acceleration and 2000000/
deceleration time during deceleration.
Ex.
At the setting of STA ([Pr. PT49 Speed acceleration time constant]) = 20000, STB ([Pr. PT50 Speed deceleration time
constant]) = 5000, and STC = 200, the actual time for the arc part is as follows.
During acceleration: 100 [ms]
2000000/20000 = 100 [ms] < 200 [ms]
Therefore, the time is limited to 100 [ms].
During deceleration: 200 [ms]
2000000/5000 = 400 [ms] > 200 [ms]
Therefore, it will be 200 [ms] as set.
• Profile position mode and positioning mode (point table method)
If a value of 1000 [ms] or more is set, the value is clamped to 1000 [ms].
The setting is enabled at the next operation start.
[Pr. PT53_Torque slope (TQS)]
Set the rate of change in the torque command per second.
When "0.0" is set, the torque slope is disabled.
This function is enabled in the profile torque mode.
This function corresponds to [Torque slope (Obj. 6087h)].
When the object is mapped to the cyclic communication, do not write values with engineering tools because the controller
overwrites the servo parameter values written with engineering tools.
Initial value
Setting range
Setting method
Ver.
0 [ms]
0 to 5000
Each axis
A5
Initial value
Setting range
Setting method
Ver.
0.0 [%/s]
0.0 to 1000000.0
Each axis
A5
0 [r/min]
Ta
Ta + STC
Tb
Tb + STC
Acceleration time
constant
Servo motor
speed
Rated speed
Preset speed
Deceleration time
constant
Ta: Time taken to reach the preset speed
Tb: Time taken to stop







































































