





























309
PARAMETER
2
P
ARAM
ETE
R
(3) Concept of position control gains
1) The [
Pr. 422 Position loop gain
] setting is rad/s
increments.
Increasing the setting improves response for the
position command and also improves servo
rigidity at a stop, but oppositely makes an
overshoot and vibration more liable to occur.
Normally set this parameter within the range
about 5 to 50.
2) To cancel all droop pulse, set 100% in [
Pr. 423
Position feed forward gain
].
Feed forward gain is a function designed to cancel
a delay caused by the droop pulses of the
deviation counter. When a tracking delay for
command pulses poses a problem, increase the
setting gradually and use this parameter within
the range where an overshoot or vibration will not
occur.
This function has no effects on servo rigidity at a
stop. Normally set 0.
(4) Adjustment procedures
1) Select the speed control using [
Pr. 800 Control
method selection
] and perform gain adjustment of
speed control.
2) Then, change the control to position control using
[
Pr. 800 Control method selection
] and adjust
position loop gain.
3) Adjust position loop gain by checking response to
the command pulses.
2.11.2 Conditional position feed function by contact input [Pr. 419, 464 to 494]
(A700)
Inputting the number of pulses (positions) in the
parameters and setting multi-speed and forward (reverse)
commands enable position control.
The motor does not return to the home position with this
conditional position feed function .
A700
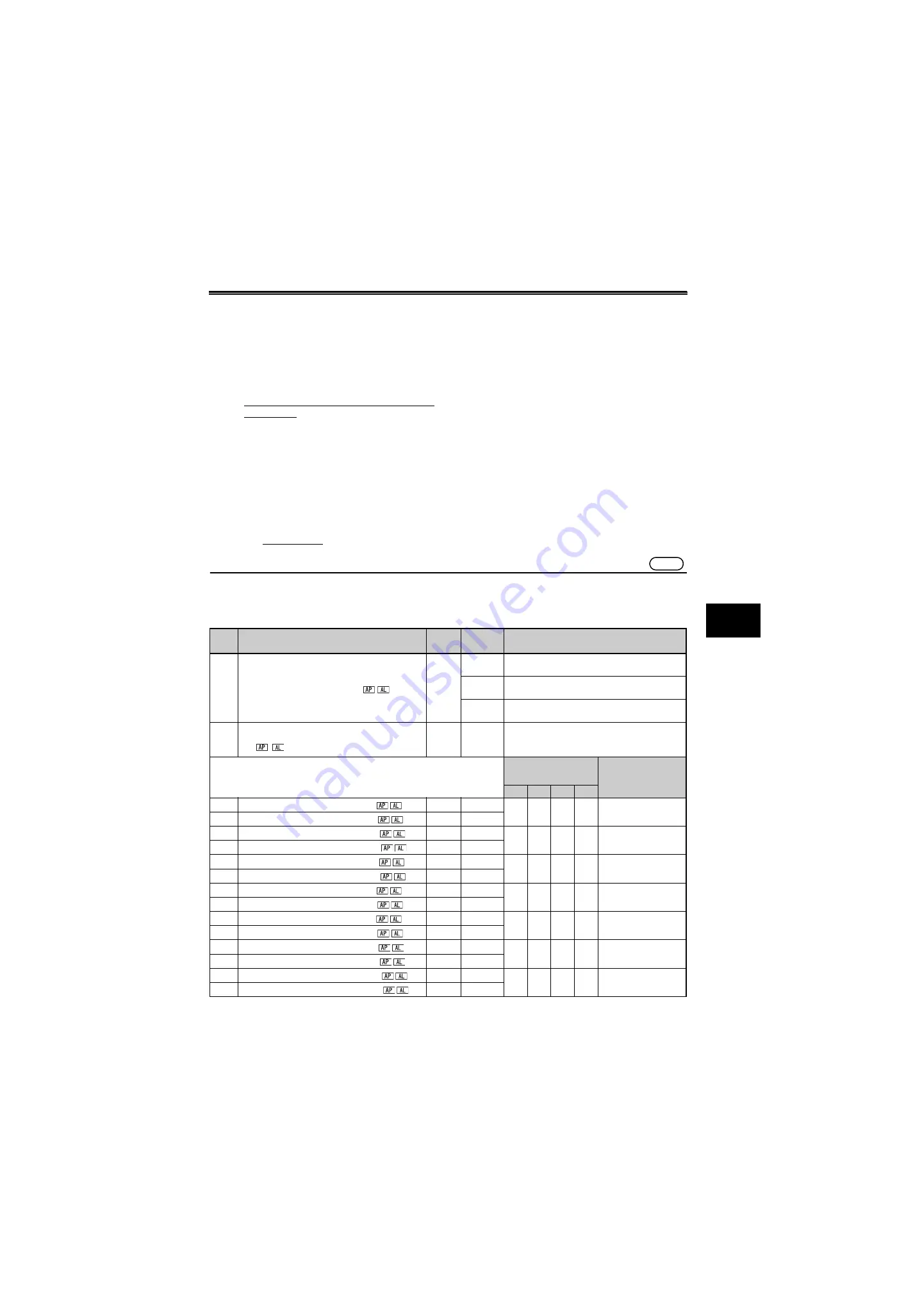
[Pr. ]
Name
Initial
Value
Setting
Range
Description
419
Position command source selection
0
0
Conditional position control function by contact
input. (position command by parameter settings)
1
Pulse train position command by programmable
controller positioning unit (when FR-A7AL installed)
2
Conditional pulse train position command by
inverter pulse train input
464
Digital position control sudden stop deceleration
time
0s
0 to
360.0s
Set the time until the inverter stops when the
forward rotation (reverse rotation) command is
turned OFF with the position feed forward function.
Selection Method
OFF
×
, ON
{
Position Feed
Frequency Setting
REX RH
RM
RL
465
First position feed amount lower 4 digits
0
0 to 9999
×
{
×
×
High speed [
Pr. 4
]
466
First position feed amount upper 4 digits
0
0 to 9999
467
Second position feed amount lower 4 digits
0
0 to 9999
×
×
{
×
Middle speed [
Pr. 5
]
468
Second position feed amount upper 4 digits
0
0 to 9999
469
Third position feed amount lower 4 digits
0
0 to 9999
×
×
×
{
Low speed [
Pr. 6
]
470
Third position feed amount upper 4 digits
0
0 to 9999
471
Fourth position feed amount lower 4 digits
0
0 to 9999
×
×
{
{
4 speed [
Pr. 24
]
472
Fourth position feed amount upper 4 digits
0
0 to 9999
473
Fifth position feed amount lower 4 digits
0
0 to 9999
×
{
×
{
5 speed [
Pr. 25
]
474
Fifth position feed amount upper 4 digits
0
0 to 9999
475
Sixth position feed amount lower 4 digits
0
0 to 9999
×
{
{
×
6 speed [
Pr. 26
]
476
Sixth position feed amount upper 4 digits
0
0 to 9999
477
Seventh position feed amount lower 4 digits
0
0 to 9999
×
{
{
{
7 speed [
Pr. 27
]
478
Seventh position feed amount upper 4 digits
0
0 to 9999
Summary of Contents for FR-A700 Series
Page 245: ...279 2 PARAMETER PARAMETER MEMO ...
Page 440: ...474 PARAMETER MEMO ...
Page 522: ...556 SELECTION MEMO ...





















































