




























284
PARAMETER
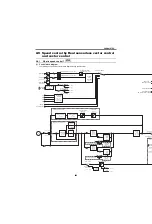
(1) Torque limit block diagram
(2) Selection of torque limit input method [
Pr.
810
]
Set [
Pr. 810 Torque limit input method selection
] to select
the method to limit output torque during speed
control.
Torque limit by parameter setting is initially set.
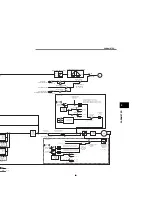
(3) Torque limit level by parameter setting
[
Pr. 810 = 0, Pr. 22, 812 to 814
]
In the initial setting, limit is made on all quadrants on
the [
Pr. 22 Stall prevention operation level (torque limit
level)
].
When you want to set the level on a quadrant basis,
set the torque limit level in [
Pr. 812 Torque limit level
(regeneration)
], [
Pr. 813 Torque limit level (3rd
quadrant)
], [
Pr.814 Torque limit level (4th quadrant)
].
When 9999 is set, [
Pr. 22
] is the torque limit level.
(4) Torque limit level by analog input
(terminal 1, 4, 6 (FR-A7AZ)) [Pr.810=1, Pr.
406*, 858, 868]
(* Pr. 406 is available only when FR-A7AZ
is installed)
Upper limit of torque limit is [
Pr. 22
], and torque limit
value is the analog input to terminal 1, terminal 4 or
terminal 6.
When torque limit value is input to terminal 1, set [
Pr.
868 Terminal 1 function assignment = 4
]. When torque
limit value is input to terminal 4, set [
Pr. 858 Terminal 4
function assignment
= 4]. Set [
Pr. 406 High resolution
analog input selection
= 4] to input torque limit value to
terminal 6 of FR-A7AZ. (Refer to page 46 for details
of function assignment of analog input terminal.)
When [
Pr. 858 = 4
] and [
Pr. 868 = 4
], terminal 1 serves
as torque limit input and terminal 4 as without
function. When [
Pr. 858
= 4] and [
Pr. 868
= 4] while [
Pr.
406
= 4], terminal 6 is the torque limit input, and
terminal 1 and terminal 4 do not have a function.
When [
Pr. 858 = 4
] and [
Pr. 868 = 2
], torque is limited
by analog input to terminal 1 for regeneration and by
terminal 4 for driving. If the setting of [
Pr. 406
] is same
with [
Pr. 858
] or [
Pr. 868
], function of terminal 6 is
valid, and terminal 1 or terminal 4 does not have a
function.
Torque limit
<Vector control>
Speed control
Speed c
-
Iq current control
IM
Encoder
[
Pr.
]
Setting
Range
Torque limit input method
810
0
(initial value)
Internal torque limit
Parameter-set torque limit operation is
performed.
Changing the torque limit parameter
value by communication enables torque
limit to be input by communication.
1
External torque limit
Torque limit using the analog voltage
(current) input to any of terminal 1,
terminal 4 or terminal 6 (FR-A7AZ) is
enabled.
quad1
[
Pr. 22
]
quad4
[
Pr.814
]
[
Pr.813
]
quad2
[
Pr.812
]
Reverse
rotation
Forward
rotation
Torque limit
Speed
Reverse
driving
Reverse
regeneration
Rated speed
quad3
+
-
Forward
regeneration
Forward
driving
㧙
Analog input or internal
torque control (
Pr. 22
etc.)
whichever is smaller
Analog input or internal
torque control (
Pr. 22
etc.)
whichever is smaller
Analog input or internal
torque control (
Pr. 22
etc.)
whichever is smaller
Analog input or internal
torque control (
Pr. 22
etc.)
whichever is smaller
Torque limit
quad1
quad4
quad3
quad2
Forward rotation
Speed
Forward
driving
Forward
regeneration
Rated speed
Reverse
driving
Reverse rotation
Speed
Reverse
regeneration
Summary of Contents for FR-A700 Series
Page 245: ...279 2 PARAMETER PARAMETER MEMO ...
Page 440: ...474 PARAMETER MEMO ...
Page 522: ...556 SELECTION MEMO ...







































































