

























6 SERVO MOTOR DRIVING
6.1 Homing mode (hm)
67
6
Homing speed (6099h)
The current home position return speed can be read. At this time, "02h" is returned to Number of entries.
The current home position return speed is returned to Speed during search for switch in a unit of r/min or mm/s.
The current creep speed is returned to Speed during search for zero in a unit of r/min or mm/s.
Set a home position return speed. At this time, write "02h" in Number of entries.
Set a home position return speed in Speed during search for switch in a unit of r/min or mm/s.
Set a creep speed in Speed during search for zero in a unit of r/min or mm/s.
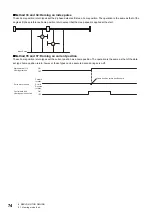
-8
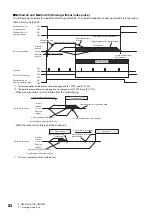
Dog cradle type
Forward rotation (CCW) or
positive direction
A position, which is specified by the first Z-phase signal
after the front end of the proximity dog is detected, is set as
the home position. If the stroke end is detected during
home position return, the travel direction is reversed.
-40
Reverse rotation (CW) or
negative direction
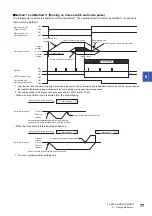
-9
Dog type last Z-phase reference
Forward rotation (CCW) or
positive direction
After the front end of the proximity dog is detected, the
position is shifted away from the proximity dog in the
reverse direction. Then, the position specified by the first Z-
phase signal or the position of the first Z-phase signal
shifted by the home position shift distance is used as the
home position. If the stroke end is detected during home
position return, the travel direction is reversed.
-41
Reverse rotation (CW) or
negative direction
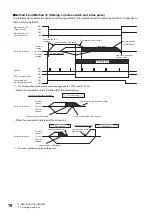
-10
Dog type front end reference
Forward rotation (CCW) or
positive direction
Starting from the front end of the proximity dog, the position
is shifted by the travel distance after proximity dog and the
home position shift distance. The position after the shifts is
set as the home position. If the stroke end is detected
during home position return, the travel direction is
reversed.
-42
Reverse rotation (CW) or
negative direction
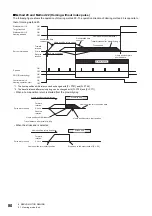
-11
Dogless Z-phase reference
Forward rotation (CCW) or
positive direction
The position specified by the first Z-phase signal, or the
position of the first Z-phase signal shifted by the home
position shift distance is used as the home position. If the
stroke end is detected during home position return, [AL. 90
Home position return incomplete warning] occurs.
-43
Reverse rotation (CW) or
negative direction
Index
Sub Index
Access
Name
Data Type
Default
6099h
0
rw
Homing speed
Number of entries
U8
2
1
Speed during
search for switch
U32
10000
2
Speed during
search for zero
U32
1000
Setting value
Home position return types
Home position return
direction
Description







































































