























74
6 SERVO MOTOR DRIVING
6.1 Homing mode (hm)
■
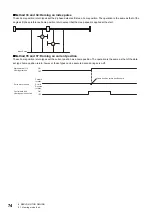
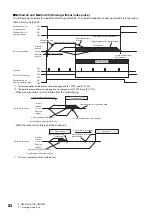
Method 33 and 34: Homing on index pulse
These home position return types set the Z-phase detected first as a home position. The operation is the same as that of the
dogless Z-phase reference home position return except that the creep speed is applied at the start.
■
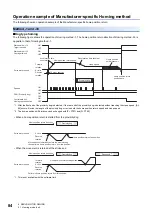
Method 35 and 37: Homing on current position
These home position return types set the current position as a home position. The operation is the same as that of the data
set type home position return; however, these types can be executed even during servo-off.
Index Pulse
33
34
Statusword bit 12
Homing attained
Controlword bit 4
Homing operation start
0 r/min
ON
OFF
ON
OFF
Home position return position data
Forward
rotation
Servo motor speed
Reverse
rotation







































































