


























6 SERVO MOTOR DRIVING
6.2 Point table mode (pt)
113
6
Operation sequence
Automatic individual positioning operation
■
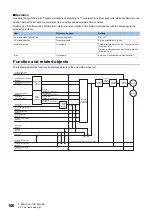
Absolute value command method ([Pr. PT01] = _ _ _ 0)
While the servo motor is stopped under servo-on state, switching on "Controlword bit 4 (New set-point)" starts the automatic
positioning operation.
The following shows the timing chart.
*1 Switching on "Controlword bit 4 (New set-point)" is invalid during the servo motor rotation.
Statusword bit 12
(Set-point acknowledge)
Controlword bit 4
(New set-point)
Target point table
Point actual value
Point demand value
1
2
1
1
2
2
*1
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
INP/S_INP
Status DO 5 bit 5
Status DO 5 bit 6
0 r/min
Point table
No. 1
Forward
rotation
Servo motor speed
Point table
No. 2
Reverse
rotation
(In-position)
(S_CPO (Rough match))
(S_MEND (Travel completion))







































































