



















6 SERVO MOTOR DRIVING
6.1 Homing mode (hm)
87
6
■
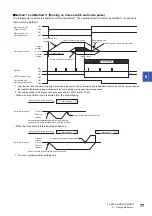
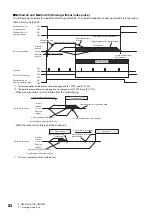
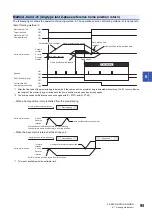
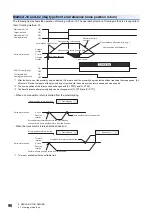
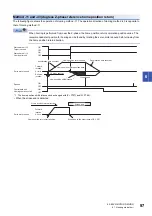
Torque limit changing dog type home position return (rear end detection Z-phase reference)
The following figure shows the operation of Homing method -1 when "Torque limit changing dog type home position return
function selection" of [Pr. PT70] is set to "1" or "3" in the indexer method. The home position return direction of Homing
method -33 is opposite to that of Homing method -1.
*1 A delay time can be set with [Pr. PT39].
*2 After the front end of the proximity dog is detected, if the rear end of the proximity dog is detected without reaching the creep speed, [AL.
90] occurs. Check the length of the proximity dog and revise if necessary or check the home position return speed and creep speed and
revise if necessary.
Statusword bit 10
Target reached
Statusword bit 12
Homing attained
Controlword bit 4
Homing operation start
Point actual value
Positive torque limit value
Negative torque limit value
[Pr. PC77]
[Pr. PC77]
0
0 r/min
*1
*2
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Power supply
Maintains the previous value
Setting time of
[Pr. PT56] or [Pr. PT57]
Home position
return speed
Creep speed
Forward
rotation
Servo motor speed
Reverse
rotation
Setting time of
[Pr. PT56]
Proximity
dog
Position where the station home position
shift distance is added
Z-phase
DOG (Proximity dog)
Enabled torque limit
Home position shift
distance







































































