





























7 PARAMETERS
7.2 Detailed list of parameters
193
7
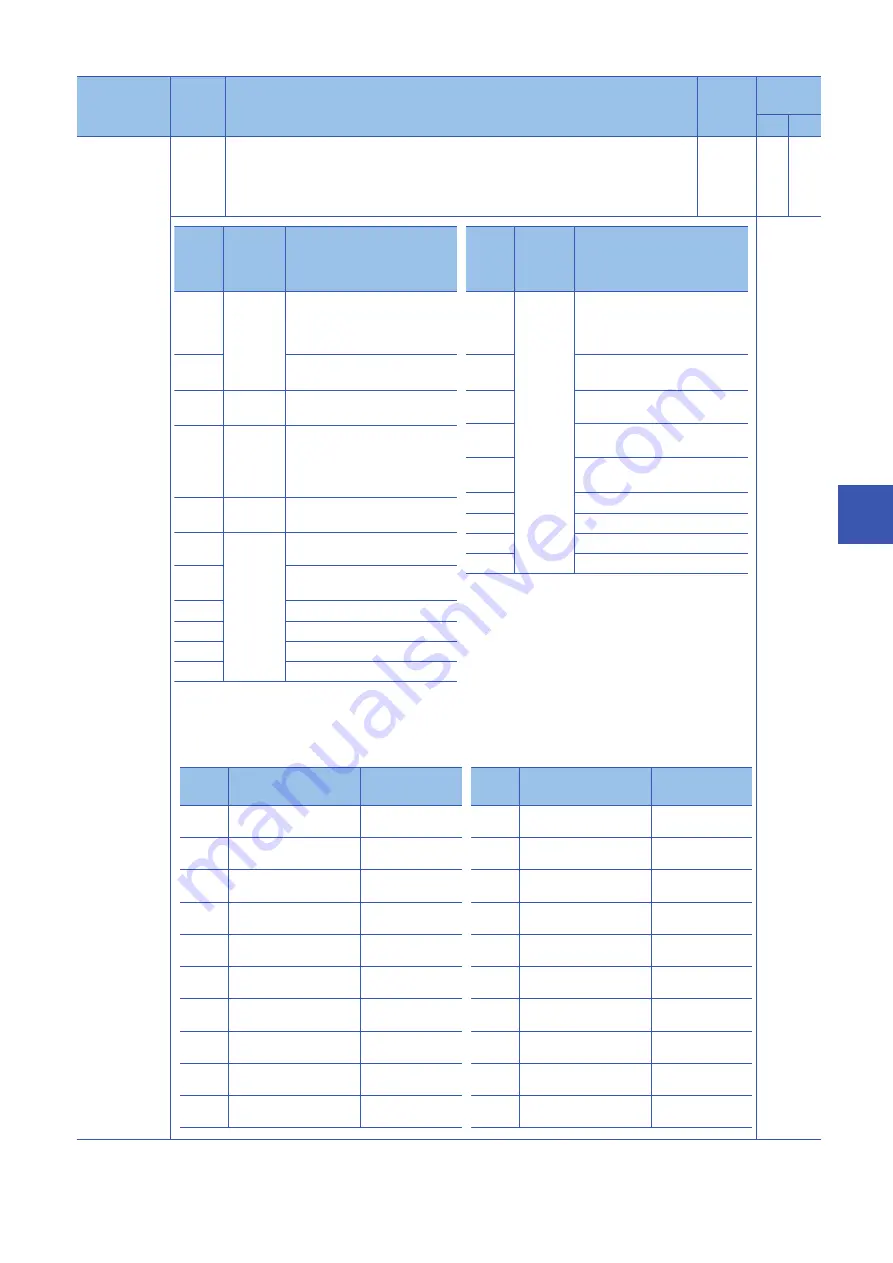
PT45
HMM
Home position
return types
Set a home position return type.
Refer to the following table for details.
Setting a value other than the setting values in the following tables (other than "-1", "-3", "-33", "35",
and "37" in the indexer method) triggers [AL. F4]. At this time, home position return cannot be
executed.
37
No./symbol/
name
Setting
digit
Function
Initial
value
[unit]
Control
mode
CP
PS
Setting
value
Home
position
return
direction
Home position return type
Setting
value
Home
position
return
direction
Home position return type
-33
Reverse
rotation
(CW) or
negative
direction
-1
Dog type (Rear end detection,
Z-phase reference)/Torque limit
changing dog type (rear end
detection, Z-phase reference)
*1*3
Dog type (Rear end detection,
Z-phase reference)/Torque limit
changing dog type (rear end
detection, Z-phase reference)
*1*3
Forward
rotation
(CCW) or
positive
direction
-2
Count type (front end detection,
Z-phase reference)
-34
Count type (front end detection,
Z-phase reference)
-36
Stopper type (stopper position
reference)
-3
Torque limit changing data set
type
*1
-38
Dog type (rear end detection, rear
end reference)
-4
Forward
rotation
(CCW) or
positive
direction
Stopper type (stopper position
reference)
-39
Count type (front end detection,
front end reference)
-5
Home position ignorance (Servo-on
position as home position)
*2
Dog cradle type
-40
Dog type last Z-phase reference
-41
-6
Forward
rotation
(CCW) or
positive
direction
Dog type (rear end detection, rear
end reference)
-42
Dog type front end reference
-7
Count type (front end detection,
front end reference)
-43
Dogless Z-phase reference
-8
Dog cradle type
-9
Dog type last Z-phase reference
-10
Dog type front end reference
-11
Dogless Z-phase reference
*1 The torque limit changing dog type and torque limit changing data set type can be used only in the indexer method.
The indexer method can be used with servo amplifiers with software version A3 or later.
*2 The setting value is available with servo amplifiers with software version A1 or later.
*3 Front end detection or rear end detection of the proximity dog can be selected with "torque limit changing dog type
home position return" in [Pr. PT70].
«
«
Setting
value
Home position return
direction
Home position
return type
Setting
value
Home position return
direction
Home position
return type
21
Reverse rotation (CW) or
negative direction
Method 3
Method 21
3
Forward rotation (CCW) or
positive direction
22
Method 22
Reverse rotation (CW) or
negative direction
Method 4
4
Forward rotation (CCW) or
positive direction
Forward rotation (CCW) or
positive direction
Method 23
5
23
Method 5
Reverse rotation (CW) or
negative direction
6
24
Method 6
Method 24
Reverse rotation (CW) or
negative direction
Forward rotation (CCW) or
positive direction
27
Reverse rotation (CW) or
negative direction
Method 27
7
Forward rotation (CCW) or
positive direction
Method 7
Method 28
8
28
Method 8
Forward rotation (CCW) or
positive direction
Reverse rotation (CW) or
negative direction
11
Method 11
Method 33
Reverse rotation (CW) or
negative direction
33
Reverse rotation (CW) or
negative direction
12
Reverse rotation (CW) or
negative direction
Method 12
Forward rotation (CCW) or
positive direction
Method 34
34
19
Forward rotation (CCW) or
positive direction
Method 19
35
Method 35
20
Forward rotation (CCW) or
positive direction
Method 20
37
Method 37
(Data set type)
«
«







































































