























70
6 SERVO MOTOR DRIVING
6.1 Homing mode (hm)
Usage
• To execute home position return securely, move the servo motor to the opposite stroke end with the jog
mode (jg) from the master station (controller) or by other means, then start homing.
• If changing the mode after home position return completion, set Target position (607Ah) to "0", then change
the control mode.
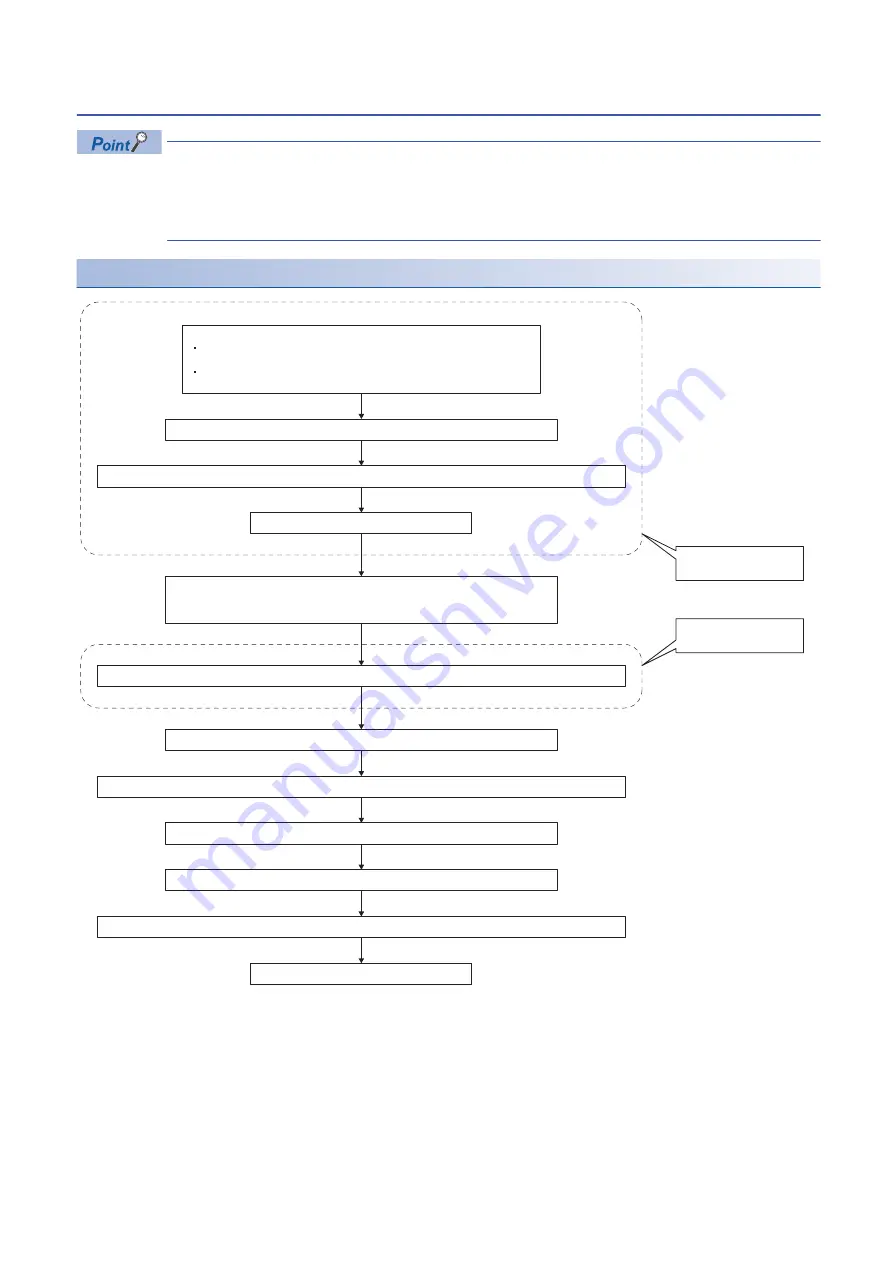
Home position return type
[Precondition setting]
Set an IP address that can communicate with the master station
(controller).
Set the point table method or the indexer method in "Control mode
selection" of [Pr. PA01].
Set Homing method (6098h).
Save the object in the EEP-ROM by using Save all parameters in Store parameters (1010h).
Cycle the power.
Skip if the settings do not
need to be changed.
Set Speed during search for switch and
Speed during search for zero of Homing speed (6099h).
Set Homing acceleration (609Ah).
Save the parameter in the
EEP-ROM if necessary.
Save the object in the EEP-ROM by using Save all parameters in Store parameters (1010h).
Specify Homing mode (hm) with Modes of operation (6060h).
Check that the control mode has been switched to Homing mode (hm) with Modes of operation Display (6061h).
Set 0Fh in Controlword (6040h). → Operation enable
Set 1Fh in Controlword (6040h) to start home position return.
Check that bit 12 (Homing attained) of Statusword (6041h) is "1".
Home position return completion







































































