




























6 SERVO MOTOR DRIVING
6.2 Point table mode (pt)
123
6
■
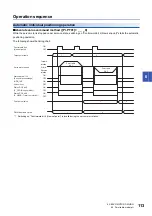
Incremental value command method ([Pr. PT01] = _ _ _ 1)
Setting "1" to the auxiliary function executes positioning at the speed set in the point table.
At this time, the position data selected at start is enabled, and the acceleration/deceleration time constant set in the next and
subsequent point tables is disabled.
By setting "1" to auxiliary functions until point table No. 254, the operation can be performed at maximum 255 speeds.
Be sure to set "0" to the auxiliary function of the last point table.
To perform varying-speed operation, be sure to set "0" to the dwell.
Setting "1" or more enables the automatic continuous positioning operation.
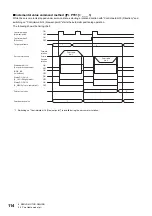
The following table shows an example of setting.
*1 Always set "0".
*2 Always set "0" to the auxiliary function of the last point table among the consecutive point tables.
The following shows an operation example with the set values listed in the table below.
*1 Always set "0".
*2 Always set "0" to the auxiliary function of the last point table among the consecutive point tables.
Point table No.
Dwell [ms]
Auxiliary function
Varying-speed operation
1
0
1
Consecutive point table data
2
0
1
3
Disabled
4
0
1
Consecutive point table data
5
0
1
6
Disabled
Point table No.
Position data
[10
STM
μ
m]
Servo motor
speed [r/min]
Acceleration
time constant
[ms]
Deceleration
time constant
[ms]
Dwell [ms]
Auxiliary
function
1
5.00
3000.00
100
150
0
1
2
3.00
2000.00
Disabled
Disabled
0
1
3
2.00
1000.00
Disabled
Disabled
0
1
4
6.00
500.00
Disabled
Disabled
Disabled
0
6.00
0
5.00
8.00
10.00
5.00
3.00
2.00
16.00
ON
OFF
1
1
ON
OFF
ON
OFF
ON
OFF
0 r/min
Target point table
Point actual value
Controlword bit 4
(New set-point)
INP/S_INP
Status DO 5 bit 5
Status DO 5 bit 6
Acceleration time constant
of point table No. 1 (100)
Deceleration time constant
of point table No. 1 (150)
Speed
(1000.00)
Speed
(3000.00)
Speed
(2000.00)
Speed
(500.00)
Servo motor speed
Position address
(In-position)
(S_CPO (Rough match))
(S_MEND (Travel completion))
Forward
rotation
Reverse
rotation







































































