


























202
7 PARAMETERS
7.2 Detailed list of parameters
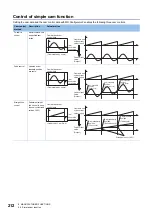
Stop method at software limit detection
By setting the third digit in [Pr. PD12], select a stop method of the servo motor for when a software limit ([Pr. PT15] to [Pr.
PT18]) is detected. With the software limit, a command position controlled in the servo amplifier is limited. Therefore, actual
stop position will not reach the set position of the software limit.
[Pr. PD12]
setting
Operation status
Remark
During rotation at constant speed
During deceleration to a stop
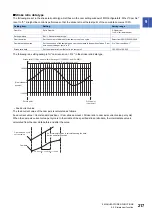
_ 1 _ _
(initial value)
The servo motor stops after
having traveled for the droop
pulses.
The home position is
maintained; however, there is a
difference between the
command and current positions.
Perform a home position return
again.
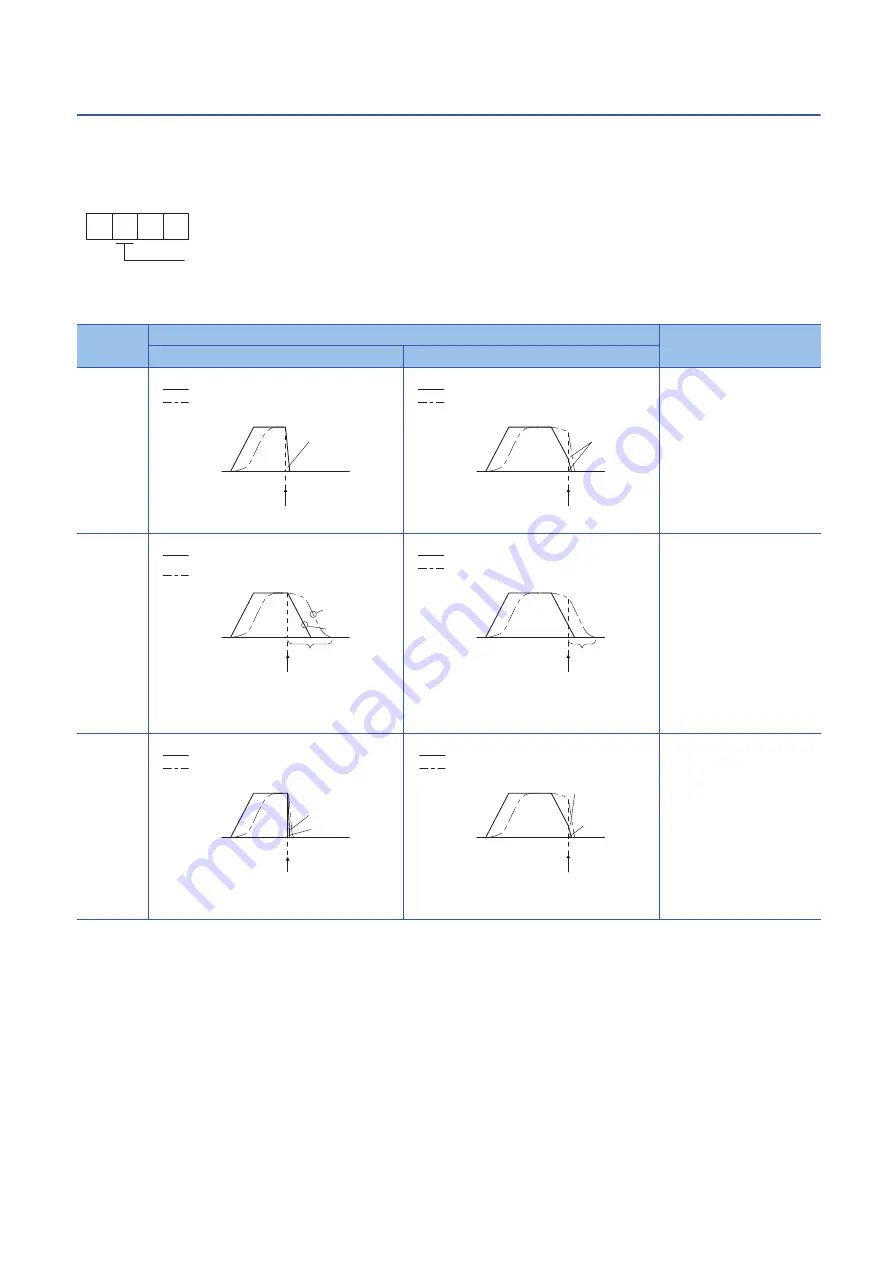
_ 2 _ _
The servo motor decelerates to
a stop with the deceleration time
constant currently selected with
the point table.
The operation is continued for
the delay of the S-pattern
acceleration/deceleration time
constants.
The home position is
maintained.
There is no difference between
the command and current
positions.
_ 3 _ _
The servo motor stops after
having traveled for the droop
pulses.
The operation is continued for
the delay of the S-pattern
acceleration/deceleration time
constants.
The home position is
maintained.
There is no difference between
the command and current
positions.
[Pr. PD12]
Stop method selection at software limit detection
1: Slow stop
2: Slow stop (deceleration to a stop by deceleration time constant)
3: Quick stop (stop by clearing remaining distance)
0 r/min
(0 mm/s)
No S-pattern acceleration/deceleration
With S-pattern acceleration/deceleration
Droop pulses
Servo
motor
speed
Software limit detection
0 r/min
(0 mm/s)
No S-pattern acceleration/deceleration
With S-pattern acceleration/deceleration
Droop pulses
Servo
motor
speed
Software limit detection
0 r/min
(0 mm/s)
No S-pattern acceleration/
deceleration
With S-pattern acceleration/
deceleration
Acceleration/
deceleration
time constant
+
S-pattern
acceleration/
deceleration
time constant
Acceleration/
deceleration
time constant
Servo
motor
speed
Decelerates to stop.
Software limit detection
0 r/min
(0 mm/s)
No S-pattern acceleration/deceleration
With S-pattern acceleration/deceleration
Servo
motor
speed
Continues
deceleration
to stop.
Software limit detection
0 r/min
(0 mm/s)
No S-pattern acceleration/deceleration
With S-pattern acceleration/deceleration
Part of S-pattern
acceleration/deceleration
time constants
+
Droop pulses
Droop pulses
Servo
motor
speed
Software limit detection
0 r/min
(0 mm/s)
No S-pattern acceleration/deceleration
With S-pattern acceleration/deceleration
Part of S-pattern
acceleration/deceleration
time constants
+
Droop pulses
Droop pulses
Servo
motor
speed
Software limit detection







































































