





















98
6 SERVO MOTOR DRIVING
6.2 Point table mode (pt)
6.2
Point table mode (pt)
About point table mode (pt)
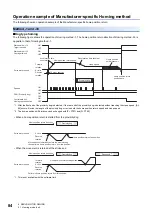
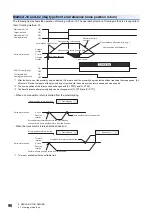
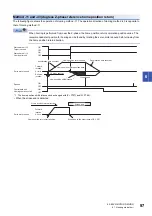
In this mode, you can arrange point tables in advance, select any point tables in "Target point table", and start the operation
with "Controlword bit 4 (New set-point)". You can select either absolute value command method or incremental value
command method with [Pr. PT01] and the auxiliary function of the point table.
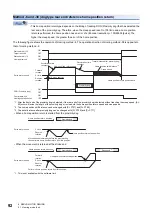
Absolute value command method
As position data, set the target address to be reached.
■
mm, inch, pulse units
Setting range: -999999 to 999999 [×10
STM
m] (STM = Feed length multiplication [Pr. PT03])
-999999 to 999999 [×10
(STM-4)
inch] (STM = Feed length multiplication [Pr. PT03])
-999999 to 999999 [pulse]
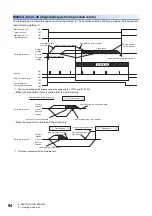
■
degree unit
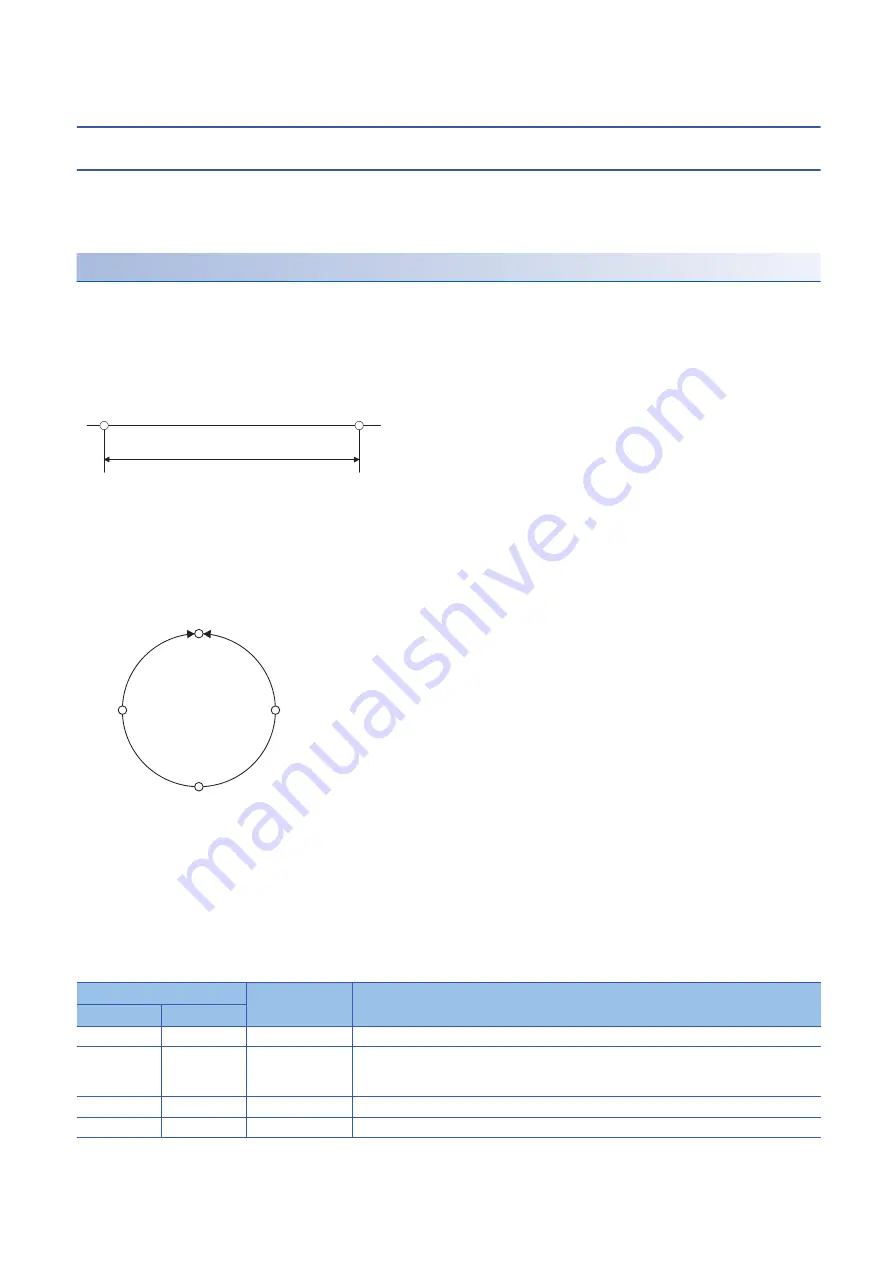
Set the target position with the CCW direction as + and the CW direction as -.
When specifying the direction as an absolute value, + or - can be used to specify the rotation direction.
The following shows an example of setting.
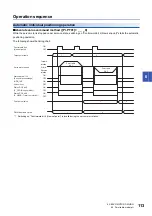
• Coordinate system in degree unit
The coordinates are determined based on the 0 degree position.
+ direction: 0
90
180
270
0
- direction: 0
-90
-180
-270
-360
270 degrees and -90 degrees are the same position.
0 degrees, 360 degrees and -360 degrees are all the same position.
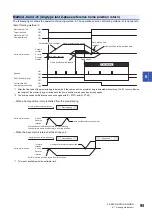
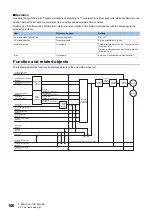
The travel direction toward the target position is the direction set by Positioning option code (60F2h) or [Pr. PT03].
Positioning option code
[Pr. PT03]
setting
Servo motor rotation direction
Bit 7
Bit 6
0
0
_ 0 _ _
Rotates to the target position in the direction specified with the sign of the position data.
1
1
_ 1 _ _
Rotates in the direction with the shorter distance from the current position to the target position. If
the distance from the current position to the target position is the same in the CCW and CW
directions, the servo motor rotates in the CCW direction.
0
1
_ 2 _ _
Rotates in the address decreasing direction regardless of the sign of the position data.
1
0
_ 3 _ _
Rotates in the address increasing direction regardless of the sign of the position data.
[×10
STM
μm] / [×10
(STM-4)
inch] / [pulse]
-999999
999999
Setting range of the position data
0
(-360)
180
(-180)
90
(-270)
270
(-90)
[degree]
Setting range of
the position data






































































