




























7 PARAMETERS
7.2 Detailed list of parameters
201
7
■
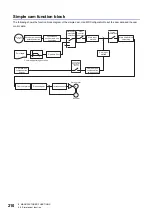
Setting example of a conveyor
Machine specifications
Pulley diameter: r = 160 [mm]
Reduction ratio: 1/n = Z
1
/Z
2
= 1/3
Z
1
: Number of gear teeth on servo motor side
Z
2
: Number of gear teeth on load gear
Servo motor encoder resolution: P
t
= 4194304 [pulse/rev]
*1 Because the command unit is "mm",
= 1000 is set. When the unit is "inch",
is 10000. When the unit is "pulse",
is 1.
Reduce CMX and CDV to within the setting range or lower, and round off each value to the closest whole number.
Therefore, set CMX = 524288 and CDV = 20944.
Electronic gear setting in the indexer method
Using [Pr. PA06] and [Pr. PA07], adjust the rotation amount "m" of the servo motor shaft which is required to rotate the load
side for "n" times. The following shows a setting example of the electronic gear.
■
Number of pulley teeth on machine side: 50, number of pulley teeth on servo motor side: 20
Set [Pr. PA06] = 50 and [Pr. PA07] = 20.
■
Number of pulley teeth on machine side: 50, number of pulley teeth on servo motor side: 20,
with geared servo motor of 1/9
Set [Pr. PA06] = 450 and [Pr. PA07] = 20.
4194304 [pulse/rev]
Z
1
Z
2
1/n = Z
1
/Z
2
= 1/3
1/n
r = 160 [mm]
Servo motor encoder resolution
CMX
CDV
P
t
=
ΔS
P
t
=
1/n • r • π • α *1
4194304
=
1/3 • 160 • π • 1000
4194304
=
167551.61
524288
¬
20944
Number of pulley teeth on
machine side: 50
Servo motor
Number of pulley teeth on
servo motor side: 20
×
=
450
20
9
1
50
20
Number of pulley teeth on
machine side: 50
Servo motor
Number of pulley teeth on
servo motor side: 20
Reduction ratio of geared
servo motor: 1/9







































































