




























200
7 PARAMETERS
7.2 Detailed list of parameters
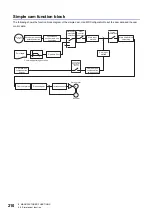
How to set the electronic gear
Electronic gear settings in the point table method
Adjust [Pr. PA06] and [Pr. PA07] to match the servo amplifier setting with the travel distance of the machine.
Pt: Servo motor encoder resolution: 4194304 [pulse/rev]
S: Travel distance per servo motor revolution [mm/rev]/[inch/rev]/[pulse/rev]
CMX/CDV = Pt/
S
The following setting example shows how to calculate the electronic gear.
• To calculate the electronic gear, the following symbols are required.
Pb: Ball screw lead [mm]
1/n: Reduction ratio
Pt: Servo motor encoder resolution [pulse/rev]
S: Travel distance per servo motor revolution [mm/rev]
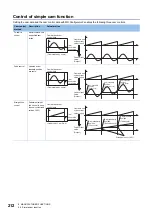
■
Setting example of a ball screw
Machine specifications
Ball screw lead Pb = 10 [mm]
Reduction ratio: 1/n = Z
1
/Z
2
= 1/2
Z
1
: Number of gear teeth on servo motor side
Z
2
: Number of gear teeth on load gear
Servo motor encoder resolution: P
t
= 4194304 [pulse/rev]
*1 Because the command unit is "mm",
= 1000 is set. When the unit is "inch",
is 10000. When the unit is "pulse",
is 1.
Therefore, set CMX = 524288 and CDV = 625.
CDV
CMX
+
-
M
Electronic gear
([Pr. PA06]/[Pr. PA07])
Servo motor
Travel distance
Deviation counter
Encoder
4194304 [pulse/rev]
Pb = 10 [mm]
Z
1
1/n = Z
1
/Z
2
= 1/2
Z
2
1/n
Servo motor encoder resolution
CMX
CDV
P
t
=
ΔS
P
t
=
1/n • Pb • α
*1
4194304
=
1/2 • 10 • 1000
4194304
=
5000
524288
=
625







































































