

























66
6 SERVO MOTOR DRIVING
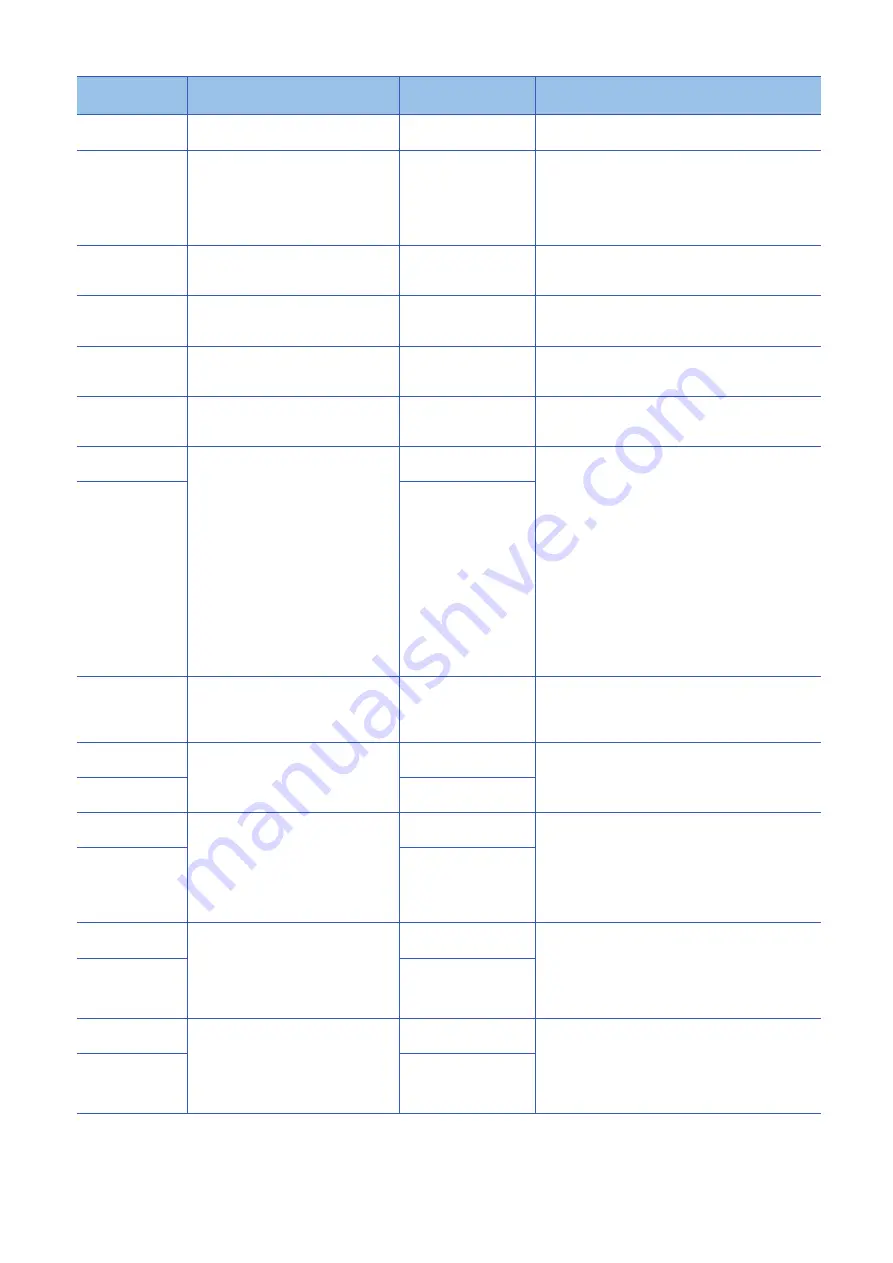
6.1 Homing mode (hm)
27
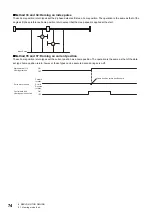
Homing without index pulse
Reverse rotation (CW) or
negative direction
Same as the dog type front end reference home position
return.
28
Homing without index pulse
Reverse rotation (CW) or
negative direction
Although this type is the same as the dog cradle type home
position return, the stop position is not on the Z-phase.
Starting from the front end of the dog, the position is shifted
by the travel distance after proximity dog and the home
position shift distance. The position after the shifts is set as
the home position.
33
Homing on index pulse
Reverse rotation (CW) or
negative direction
Although this type is the same as the dogless Z-phase
reference home position return, the creep speed is applied
as the movement start speed.
34
Homing on index pulse
Forward rotation (CCW) or
positive direction
Although this type is the same as the dogless Z-phase
reference home position return, the creep speed is applied
as the movement start speed.
35
Homing on current position
The current position is set as the home position. This type
can be executed even when the servo amplifier is not in the
Operational enabled state.
37
Homing on current position
The current position is set as the home position. This type
can be executed even when the servo amplifier is not in the
Operational enabled state.
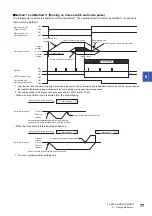
-1
Dog type
(Rear end detection, Z-phase reference)/
Torque limit changing dog type
(Front end detection, Z-phase reference)
Forward rotation (CCW) or
positive direction
Deceleration starts at the front end of the proximity dog.
After the rear end is passed, the position specified by the
first Zphase signal, or the position of the first Z-phase
signal shifted by the specified home position shift distance
is used as the home position.
In the indexer method, deceleration starts at the front end
of the proximity dog, and then the first Z-phase signal at
which a deceleration to a stop is possible or the position of
the Z-phase signal shifted by the specified home position
shift distance is used as the home position. The torque limit
values in Positive torque limit value (60E0h) and Negative
torque limit value (60E1h) are enabled during execution of
home position return, and the torque limit value in [Pr.
PC77] is enabled when the home position return is
stopped.
-33
Reverse rotation (CW) or
negative direction
-3
Data set type home position return/torque
limit changing data set type
The current position is set as the home position.
In the indexer method, the current position is set as the
home position. The torque limit value becomes 0 when
switched to the homing mode (hm).
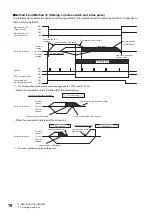
-4
Stopper type
(Stopper position reference)
Forward rotation (CCW) or
positive direction
A workpiece is pressed against a mechanical stopper, and
the position where it is stopped is set as the home position.
If the stroke end is detected during home position return,
[AL. 90 Home position return incomplete warning] occurs.
-36
Reverse rotation (CW) or
negative direction
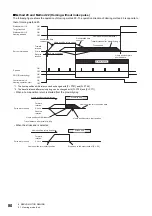
-2
Count type
(Front end detection, Z-phase reference)
Forward rotation (CCW) or
positive direction
At the front end of the proximity dog, deceleration starts.
After the front end is passed, the position specified by the
first Zphase signal after the set distance or the position of
the Zphase signal shifted by the set home position shift
distance is set as a home position. If the stroke end is
detected during home position return, the travel direction is
reversed.
-34
Reverse rotation (CW) or
negative direction
-6
Dog type
(Rear end detection, rear end reference)
Forward rotation (CCW) or
positive direction
Deceleration starts from the front end of the proximity dog.
After the rear end is passed, the position is shifted by the
travel distance after proximity dog and the home position
shift distance. The position after the shifts is set as the
home position. If the stroke end is detected during home
position return, the travel direction is reversed.
-38
Reverse rotation (CW) or
negative direction
-7
Count type
(Front end detection, front end reference)
Forward rotation (CCW) or
positive direction
Deceleration starts from the front end of the proximity dog.
The position is shifted by the travel distance after proximity
dog and the home position shift distance. The position after
the shifts is set as the home position. If the stroke end is
detected during home position return, the travel direction is
reversed.
-39
Reverse rotation (CW) or
negative direction
Setting value
Home position return types
Home position return
direction
Description







































































