



























164
6 SERVO MOTOR DRIVING
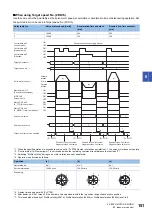
6.4 Jog mode (jg)
jg mode operation sequence in the point table method
■
When operating at a constant speed
■
When changing the speed during operation
You can change the servo motor speed by changing the "Profile velocity" during operation. However, the servo motor speed
cannot be changed during deceleration. The acceleration time constant and the deceleration time constant can be changed
only while the servo motor is stopped.
Controlword bit 4
(Rotation start)
Controlword bit 5
(Direction)
Status DO 5 bit 5
Status DO 5 bit 6
0 r/min
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Decelerates with Profile deceleration
Forward
rotation
Servo motor speed
*4
Reverse
rotation
Accelerates with Profile acceleration
(S_CPO (Rough match))
(S_MEND (Travel completion))
Profile velocity
2000.00 r/min
1000.00 r/min
1500.00 r/min
Controlword bit 4
(Rotation start)
Controlword bit 5
(Direction)
500.00 r/min
Status DO 5 bit 5
Status DO 5 bit 6
0 r/min
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Decelerates with Profile deceleration
Forward
rotation
Servo motor speed
Reverse
rotation
Accelerates with Profile acceleration
(S_CPO (Rough match))
(S_MEND (Travel completion))







































































