





























56
5 CiA 402 DRIVE PROFILE
5.1 State machine control of the servo amplifier
5
CiA 402 DRIVE PROFILE
• Do not issue operation commands to the same servo amplifier from two or more masters. Otherwise, the
servo motor may operate unexpectedly.
This chapter describes how to drive a servo motor in the communication. For MR-J4-_GF_(-RJ) servo amplifier, objects are
assigned according to Index of the CiA 402 drive profile. The master station (controller) can drive the servo motor by
accessing the assigned objects.
Refer to the following for details of the objects.
5.1
State machine control of the servo amplifier
Function explanation
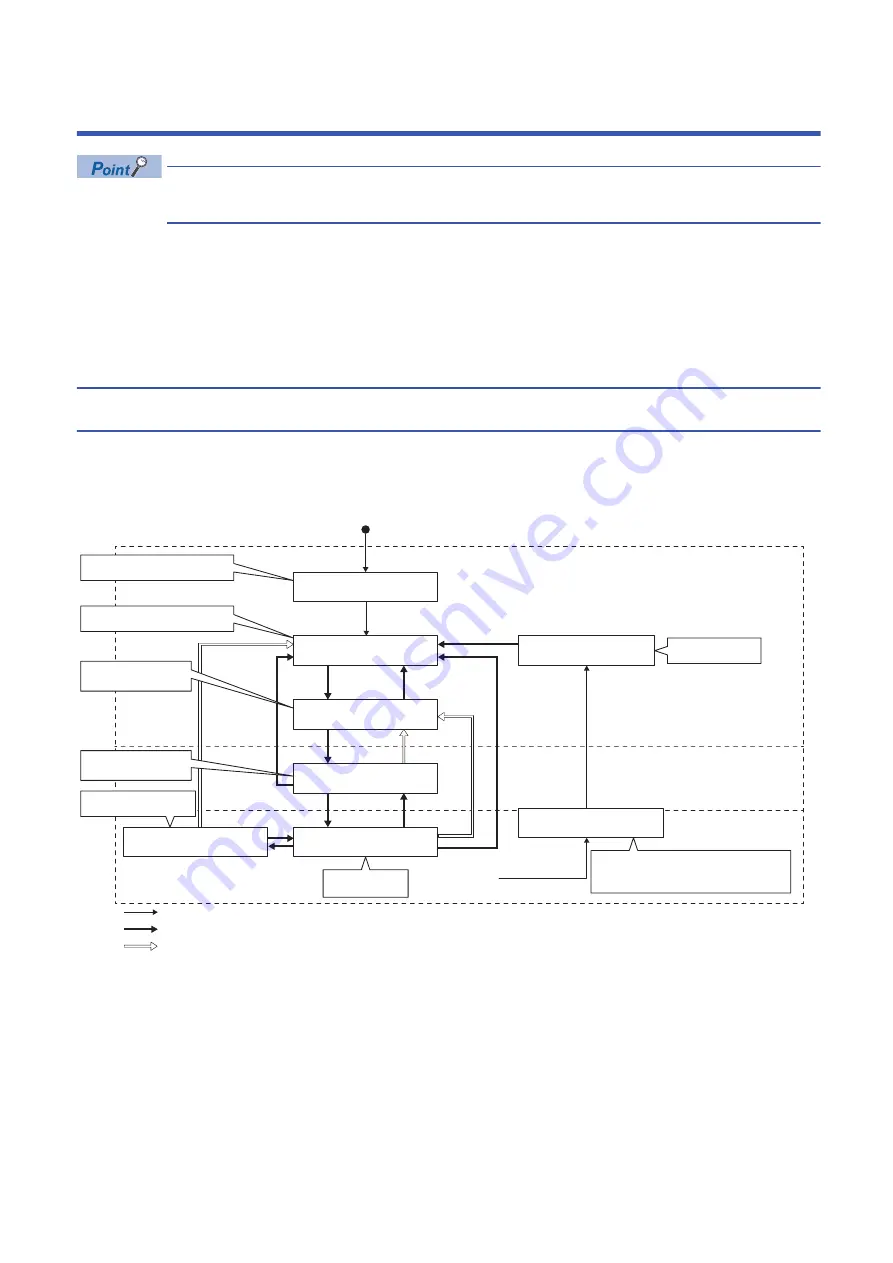
The servo amplifier status is controlled based on the state machine below. Setting the control command (6040h) from the
master station (controller) changes the status of the slave stations (servo amplifiers). The current servo amplifier status can be
read with the control status (6041h).
Power on
(14)
(13)
(9)
(8)
(12)
(11)
(16)
(F) Quick stop active
(10)
(2)
(0)
(1)
(7)
(15)
(3)
(6)
(4)
(5)
(E) Operation enabled
(D) Switched on
(C) Ready to switch on
(B) Switch on disabled
(A) Not ready to switch on
(H) Fault
(G) Fault reaction active
Ready-off/Servo-off
(During main circuit charging)
Servo initialization in process
In wait for forced stop reset
Alarm occurring
In wait for main circuit
charging (ready-off)
Ready-off/Servo-off
(Main circuit charging completed)
Drive standby
(servo-off)
Forced stop
deceleration
Ready-on/Servo-on
Alarm handling in process (forced stop
deceleration, alarm history writing, and
alarm display change)
In normal drive
(servo-on)
Alarm occurrence
Transition by slave
Transition by master
Transition by slave or master







































































