
























76
6 SERVO MOTOR DRIVING
6.1 Homing mode (hm)
■
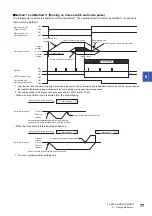
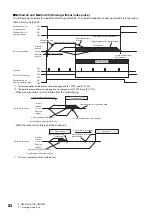
Method 4 (Homing on positive home switch and index pulse) and Method 6 (Homing on
negative home switch and index pulse)
The following figure shows the operation of Homing method 4. The operation direction of Homing method 6 is opposite to that
of Homing method 4.
*1 The home position shift distance can be changed with [Pr. PT07] and [Pr. PT69].
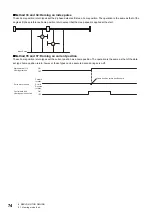
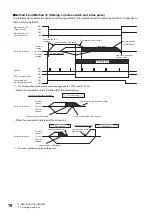
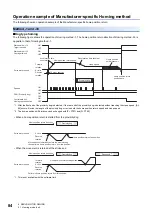
• When a home position return is started from the proximity dog
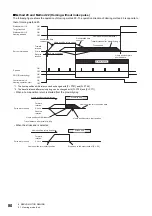
• When the stroke end is detected
Controlword bit 4
Homing operation start
0 r/min
Statusword bit 10
Target reached
Statusword bit 12
Homing attained
ON
OFF
ON
OFF
ON
OFF
ON
OFF
ON
OFF
Deceleration time constant
Home position
shift distance
*1
Acceleration time
constant
Home position return speed
Creep speed
Forward
rotation
Servo motor speed
10 ms or shorter
Reverse
rotation
Home position return
position data
Proximity dog
Z-phase
DOG (Proximity dog)
0 r/min
Home position return direction
Proximity dog
Home position return position data
Forward
rotation
Servo motor speed
Reverse
rotation
Home position shift distance
Home position return start position
0 r/min
Home position return direction
Stroke end
Forward
rotation
Servo motor speed
Home position return start position
Stops due to the occurrence of [AL. 90]






































































