





























10 OBJECT DICTIONARY
10.1 Object dictionary list
267
10
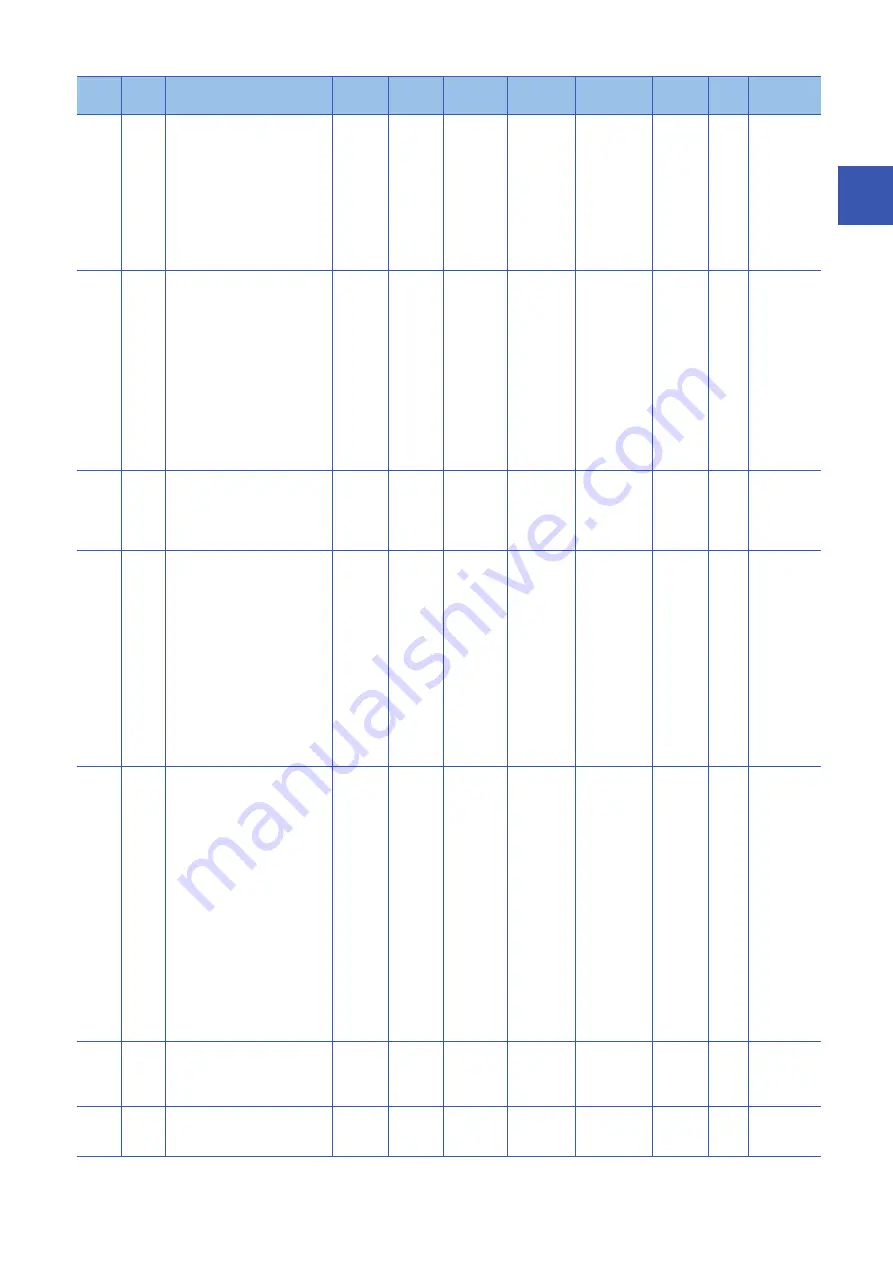
2D80
0
Target CAM No.
Set a cam No.
When [Cam control data No. 49 -
Cam No.] is "0", the cam number
set with Target CAM No. (2D80h)
is enabled.
If the cam number is not "0", the
setting of [Cam control data No.
49] is enabled, and this object is
disabled.
U8
rw
Possible
00h to 08h
2DD1
0
Target speed No.
The command speed,
acceleration time constant, and
deceleration time constant of the
next station to execute in the
indexer mode (idx) is specified
with the point table No.
When Profile velocity (6081h),
Profile acceleration (6083h), and
Profile deceleration (6084h) are
all set to values other than "0",
the setting value of 2DD1h is
disabled.
I16
rw
Possible
0
0000h to
FFFFh
603F
0
Error code
The latest error No. that occurred
after the power on is returned.
The error number is as follows.
1000h: Generic error
U16
ro
Possible
0
0000h to
FFFFh
6040
0
Controlword
Set control commands to control
the servo amplifier.
Bit 0: switch on
Bit 1: enable voltage
Bit 2: quick stop
Bit 3: enable operation
Bit 4 to Bit 6: operation mode
specific
Bit 7: fault reset
Bit 8: halt
Bit 9: operation mode specific
Bit 10 to Bit 14: reserved
Bit 15: operation mode specific
U16
rw
Possible
0
0000h to
FFFFh
6041
0
Statusword
The current control status can be
checked.
Bit 0: ready to switch on
Bit 1: switched on
Bit 2: operation enabled
Bit 3: fault
Bit 4: voltage enabled
Bit 5: quick stop
Bit 6: switch disabled
Bit 7: warning
Bit 8: reserved
Bit 9: remote
Bit 10: target reached
Bit 11: internal limit active
Bit 12 to Bit 13: operation mode
specific
Bit 14 to Bit 15: reserved
U16
ro
Possible
0000h to
FFFFh
605A
0
Quick stop option code
The operation method of
deceleration to a stop can be
specified.
I16
rw
Impossible
2
0002h (fixed)
605D
0
Halt option code
Set how to decelerate the servo
motor to a stop at Halt reception.
I16
rw
Impossible
1
0001h (fixed)
Index
Sub
Index
Name and function
Data
Type
Access Variable
mapping
Default
Range
Units
EEP-
ROM
Parameter







































































