





























3 MAJOR POSITIONING CONTROL
3.2 Setting the Positioning Data
93
3
2-axis circular interpolation control with center point designation (INC circular)
■
Operation chart
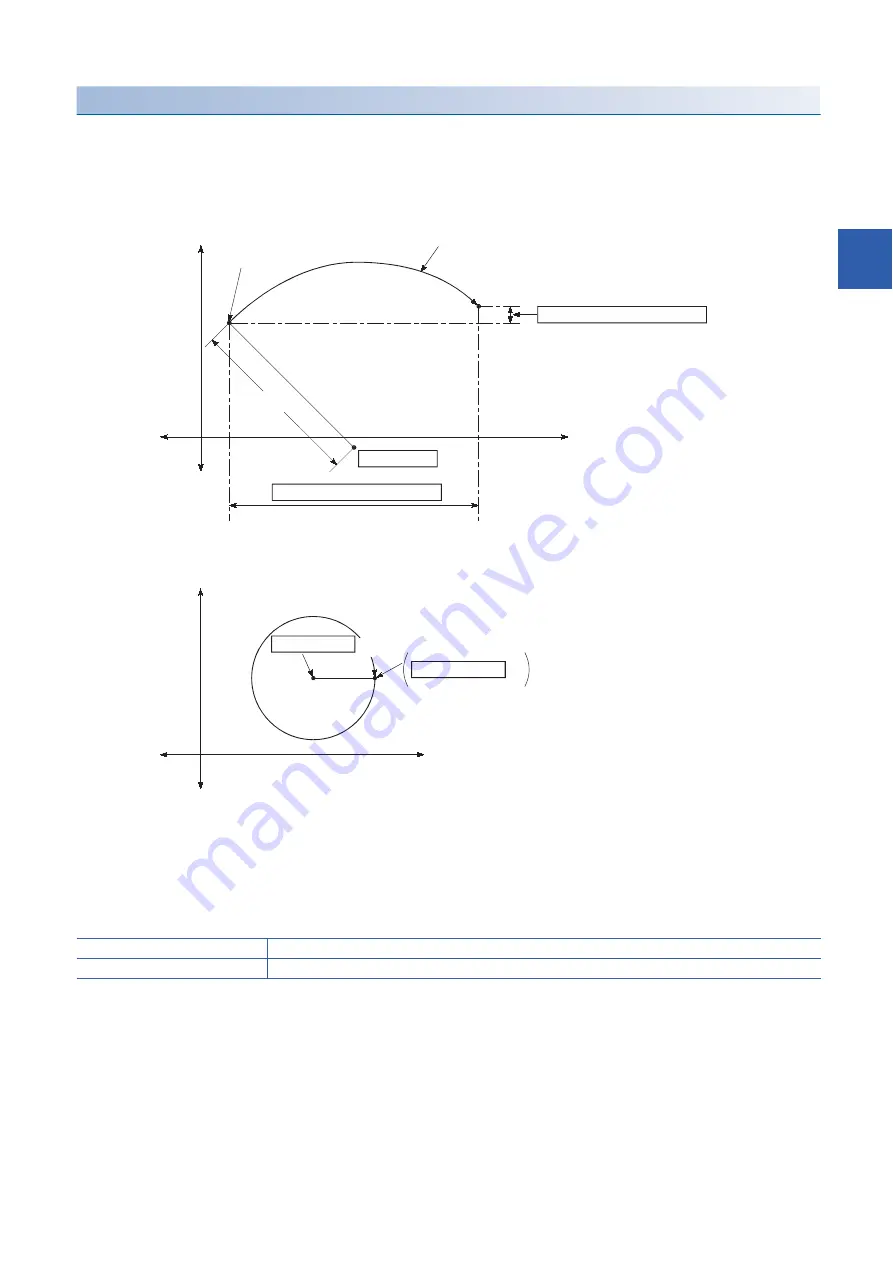
In the incremental system, 2-axis circular interpolation control with center point designation, positioning is carried out from the
current stop position (start point address) to a position at the end of the movement amount set in "[Da.6] Positioning address/
movement amount", in an arc path having as its center the address (arc address) of the center point set in "[Da.7] Arc
address".
Positioning of a complete round with a radius of the distance from the start point address to the arc center point can be carried
out by setting the movement amount to "0".
In circular interpolation control with center point designation, an angular velocity is calculated on the assumption that
operation is carried out at a command speed on the arc using the radius calculated from the start point address and center
point address, and the radius is compensated in proportion to the angular velocity deviated from that at the start point.
Thus, when there is a difference (error) between a radius calculated from the start point address and center point address
(start point radius) and a radius calculated from the end point address and center point address (end point radius), the
composite speed differs from the command speed as follows.
Start point radius > End point radius
As compared with the speed without error, the speed becomes slower as end point address is reached.
Start point radius < End point radius
As compared with the speed without error, the speed becomes faster as end point address is reached.
Radius
Movement by circular interpolation
Forward direction
Reverse direction
Reverse direction
Forward direction
Start point address
(current stop position)
Arc center point
(Arc address)
Movement amount to the end point
Movement amount to the end point
Arc center point
Reverse direction
Reverse direction
Forward direction
Forward direction
Movement amount = 0
(Arc address)
Summary of Contents for RD77MS16
Page 1: ...MELSEC iQ R Simple Motion Module User s Manual Application RD77MS2 RD77MS4 RD77MS8 RD77MS16 ...
Page 2: ......
Page 316: ...314 9 COMMON FUNCTIONS 9 4 External Input Signal Select Function Program example ...
Page 317: ...9 COMMON FUNCTIONS 9 4 External Input Signal Select Function 315 9 ...
Page 575: ...13 PROGRAMMING 13 4 Positioning Program Examples 573 13 Error reset program Axis stop program ...
Page 643: ......







































































