





























472
14 USING A LINEAR SERVO MOTOR
14.3 Operation and functions
Setting of linear encoder direction and linear servo motor direction
Set the first digit of [Pr. PC27] (Encoder pulse count polarity selection) so that the positive direction of the linear servo motor
matches the increasing direction of the linear encoder feedback.
■
Parameter setting method
1.
Confirm the positive direction of the linear servo motor. [Pr. PA14] determines the relation of the travel direction of the
linear servo motor under commands as follows.
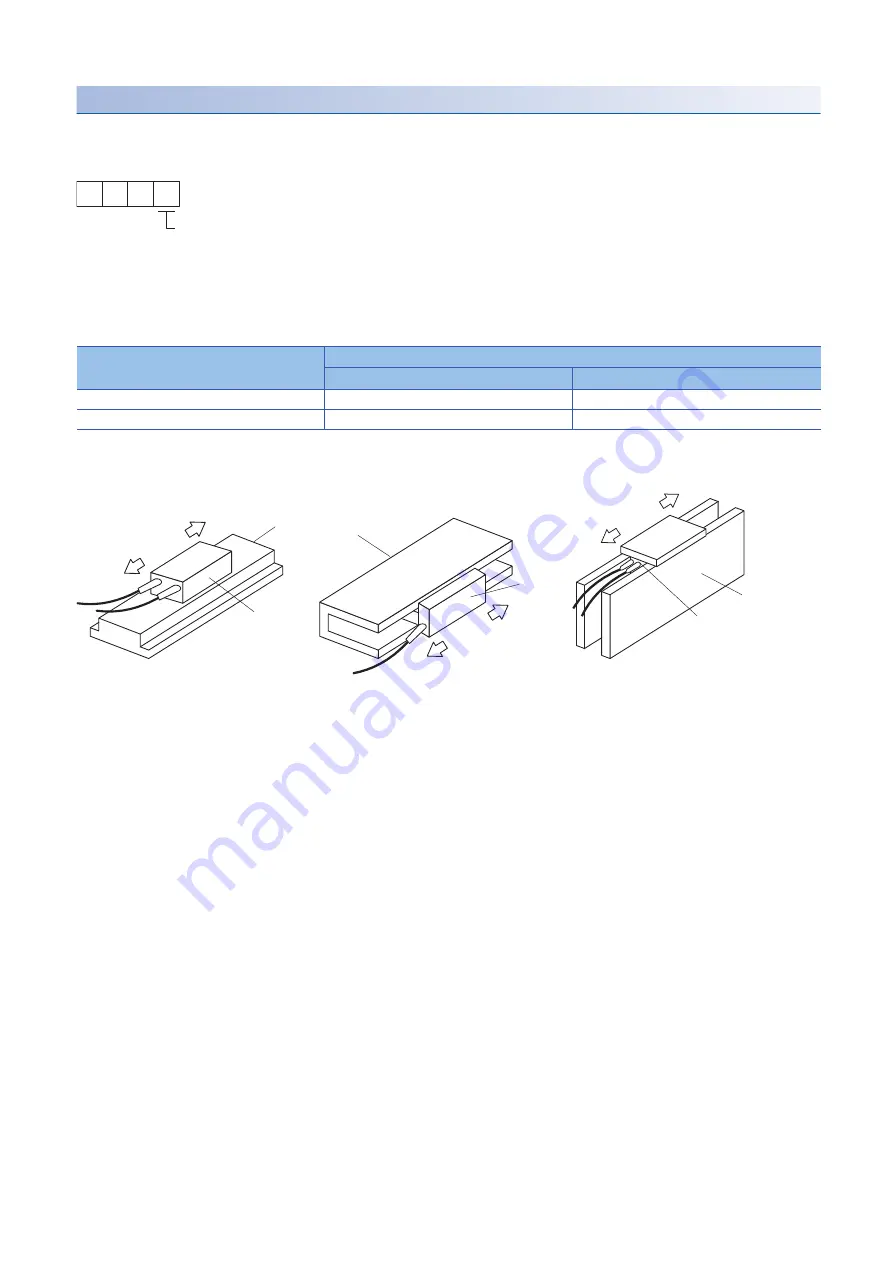
The positive/negative directions of the linear servo motor are as follows.
2.
Confirm the increasing direction of the linear encoder.
3.
If the positive direction of the linear servo motor matches the increasing direction of the linear encoder, set [Pr. PC27] to
"_ _ _ 0". If the positive direction of the linear servo motor does not match the increasing direction of the linear encoder,
set [Pr. PC27] to "_ _ _ 1".
■
Confirmation method
Confirm the positive direction of the linear servo motor and the increasing direction of the linear encoder in the following
procedure.
1.
In servo-off status, move the linear servo motor in the positive direction manually.
2.
Confirm the motor speed (in the positive and negative directions) at that time with MR Configurator2.
3.
A positive value is displayed for the motor speed when (1) [Pr. PC27] is set to "_ _ _ 0", (2) the positive direction of the
linear servo motor matches the increasing direction of the linear encoder, and (3) the linear servo motor is operated in
the positive direction. If the positive direction of the linear servo motor does not match the increasing direction of the
linear encoder, the motor speed will be a negative value. When [Pr. PC27] is set to "_ _ _ 1" and the positive direction of
the linear servo motor matches the increasing direction of the linear encoder, if the linear servo motor operates in the
positive direction, the motor speed will be a negative value.
[Pr. PA14] setting
Travel direction of linear servo motor
Address increasing command
Address decreasing command
0
Positive direction
Negative direction
1
Negative direction
Positive direction
[Pr. PC27]
Encoder pulse count polarity selection
0: Linear servo motor positive direction and linear encoder increasing direction
1: Linear servo motor positive direction and linear encoder decreasing direction
Secondary
side
Primary side
Positive
direction
Negative
direction
LM-H3/LM-F series
LM-U2 series
LM-K2 series
Negative direction
Positive
direction
Secondary side
Primary
side
Negative
direction
Positive
direction
Table
Primary
side
Secondary
side
Summary of Contents for MELSERVO-J4 series
Page 2: ......
Page 605: ...APPX Appendix 6 EC declaration of conformity 603 A ...
Page 638: ...636 APPX Appendix 14 Encoder output pulse setting method MEMO ...
Page 645: ......







































































