





























208
5 PARAMETERS
5.2 Detailed list of parameters
PC29
*COPB
Function selection
C-B
_ _ _ x
For manufacturer setting
0h
_ _ x _
0h
_ x _ _
0h
x _ _ _
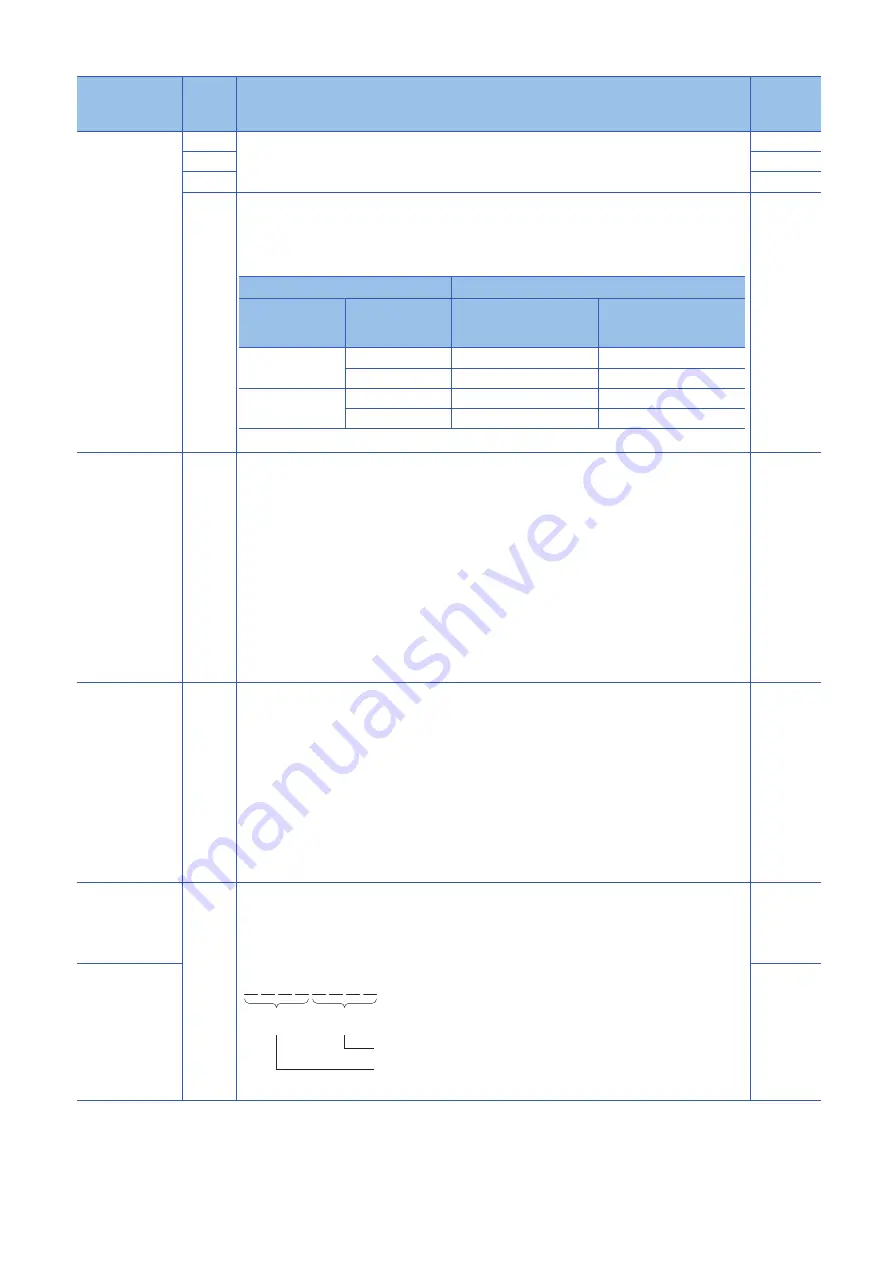
Torque POL reflection selection
The torque polarity can be changed with the combination of this parameter and [Pr. PA14 Rotation direction
selection/travel direction selection].
0: Enabled
1: Disabled
The torque command polarity can be changed only when [Pr. PA14] is set to "1", and "0" is set to this digit.
1h
PC31
RSUP1
Vertical axis freefall
prevention
compensation
amount
Set the compensation amount of the vertical axis freefall prevention function.
Set it per servo motor rotation amount or linear servo motor travel distance.
This function pulls up the vertical axis in increments of rotation amount of the rotary servo motor and travel
distance of the liner servo motor toward the rotation/travel direction of the forward pulse input for a positive
value, and of the reverse pulse input for a negative value.
For example, when [Pr. PA14 Rotation direction selection/travel direction selection] is set to "1" and a positive
value is set for the compensation amount, the servo motor pulls up in the CW direction.
The vertical axis freefall prevention function is performed when all of the following conditions are met.
1) The control mode is set to the position mode.
2) The setting value of this parameter is other than "0".
3) The forced stop deceleration function is enabled.
4) Alarm occurs or EM2 turns off when the servo motor speed is zero speed or less.
5) MBR (Electromagnetic brake interlock) was enabled in [Pr. PD07] to [Pr. PD09], and the base circuit shut-
off delay time was set in [Pr. PC02].
Setting range: -25000 to 25000
0
[0.0001 rev]/
[0.01 mm]
PC38
ERW
Error excessive
warning level
Set an error excessive warning level.
The setting unit can be changed with "Error excessive alarm/error excessive warning level unit selection" in
[Pr. PC06].
Set this per rev. for rotary servo motors and direct drive motors. Setting over 200 rev will be clamped with 200
rev. Set this per mm for linear servo motors. However, setting "0" will not trigger [AL. 9B Error excessive
warning].
When an error reaches the set value, [AL. 9B Error excessive warning] will occur. When the error decreases
lower than the set value, the warning will be canceled automatically. The minimum pulse width of the warning
signal is 100 [ms].
Set as follows.: [Pr. PC38 Error excessive warning level] < [Pr. PC01 Error excessive alarm level] When you
set as follows, [AL. 52 Error excessive] will occur earlier than the warning.: [Pr. PC38 Error excessive warning
level]
[Pr. PC01 Error excessive alarm level]
Setting range: 0 to 1000
0 [rev]/[mm]
PC67
FEWL
Following error
output level (lower
four digits)
Set a following error output level.
Upper and lower are a set.
When the state in which droop pulses
the parameter setting value continues for the time set in [Pr. PC69
Following error output filtering time], "Statusword bit 13 Following error" will be turned on. However, setting
"FFFFh FFFFh" will disable it.
Set the setting value in hexadecimal.
Setting range: 0000h 0000h to FFFFh FFFFh
0000h
[pulse]
PC68
FEWH
Following error
output level (upper
four digits)
00C0h
[pulse]
No./symbol/
name
Setting
digit
Function
Initial
value
[unit]
0 _ _ _ : Enabled
CCW or positive direction
CW or negative direction
1 _ _ _ : Disabled
CCW or positive direction
CW or negative direction
0 _ _ _ : Enabled
CW or negative direction
CCW or positive direction
1 _ _ _ : Disabled
CCW or positive direction
CW or negative direction
Servo motor rotation direction/travel direction
Torque mode
Torque command:
Positive
Torque mode
Torque command:
Negative
0
1
Setting value
[Pr. PA14]
[Pr. PC29]
Upper four
digits
Lower four
digits
[Pr. PC67]
[Pr. PC68]
Summary of Contents for MELSERVO-J4 series
Page 2: ......
Page 605: ...APPX Appendix 6 EC declaration of conformity 603 A ...
Page 638: ...636 APPX Appendix 14 Encoder output pulse setting method MEMO ...
Page 645: ......







































































