





























20
XtrapulsPac – User Guide
Chapter 2 - Commissioning
The
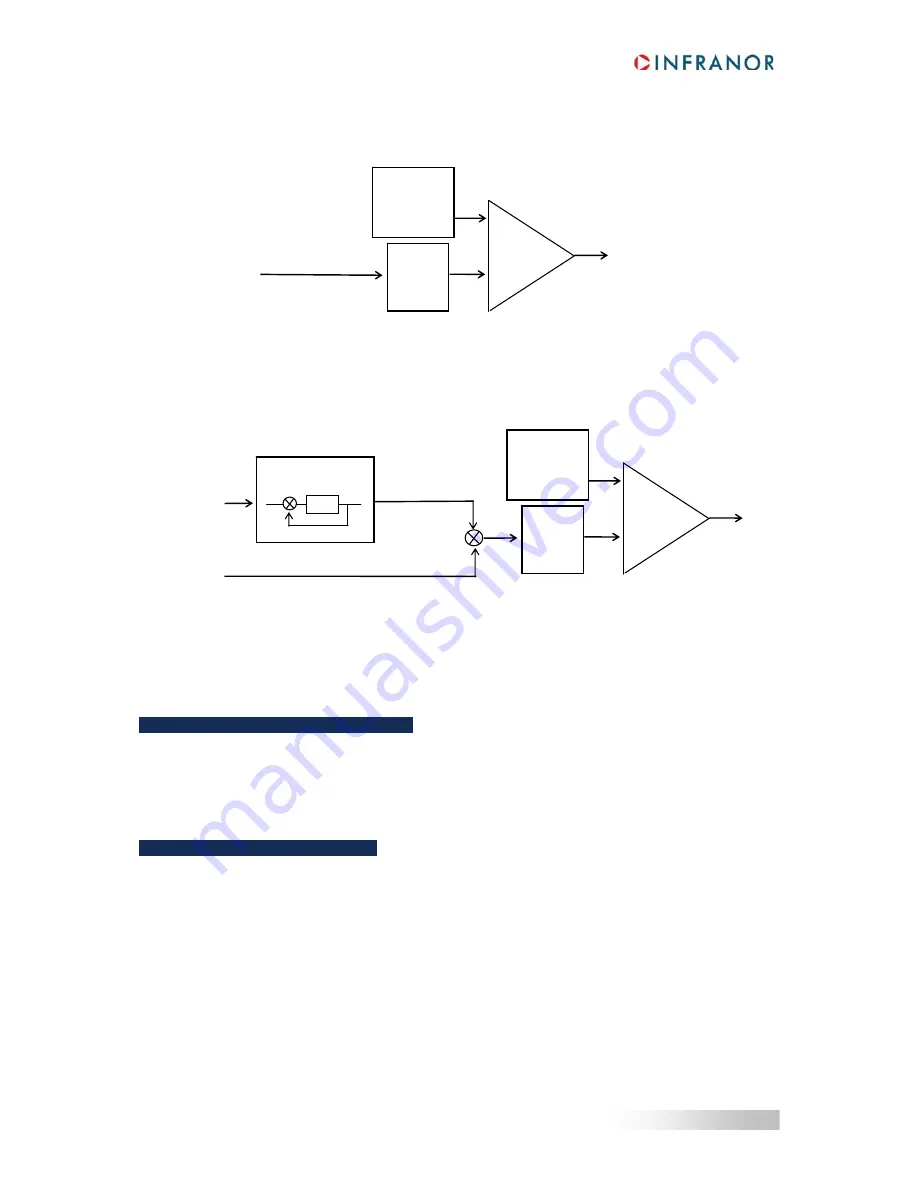
Position error detection mode
defines the operation mode of the axis following error protection.
- When
Absolute
is selected, the following error protection is operating as described below:
The measured position error value is continuously compared with the
Position error threshold
parameter value.
When the measured position error is exceeding the
Position error threshold
, the position following error is
released. This configuration is used for applications requiring the smallest possible following error.
- When
Relative to dynamic model
is selected, the following error protection is operating as described below:
The measured position error value is continuously compared with the theoretical position error given by the
position loop model. When the difference is exceeding the
Position error threshold
, the position following error
is released. In this configuration, when the position servo loop is adjusted to get the motor position continuously
lagging the reference position (applications for positioning without overshoot and with a high following error
value), any small anomaly in the actuator behaviour can be detected.
2.4.5
-
C
ONFIGURATION OF THE DRIVE
E
NABLE
When "Enable control by
SOFTWARE
" is selected, the drive is enabled and disabled by using the control word
(On/Off command in GemDriveStudio or fieldbus control).
When "Enable control by
HARDWARE
" is selected, the drive is enabled and disabled by using the ENABLE logic
input.
2.4.6
-
Q
UICK TEST OF THE SERVO DRIVE
The servo loop stability can be tested on-line by moving the motor in speed profile mode or in position profile
mode. The regulator gains can be manually optimized or by using the auto-tuning procedure.
Profile Velocity parameters
Enter the
Maximum velocity
parameter value according to the motor
Maximum speed
and the limitation due to
the mechanical load in the application. For the first tests, a reduced velocity range is preferred in order to prevent
hazardous movements with wide amplitude. This parameter is active in both velocity profile mode and position
profile mode.
Enter the
Acceleration
and
Deceleration
parameter values. Small values can be used as a starting point in order
to prevent sharp movements on the mechanical load. This parameter is active in both velocity profile mode and
position profile mode.
Position loop
model
Position
error
threshold
Position
reference
Measured
position error
Theoretical
position error
Comparator
Position following
error
-
+
Absolute
value
Position
error
threshold
Measured
position error
Comparator
Position following
error
Absolute
value







































































