HTX30 Product Manual
Appendix
8-49
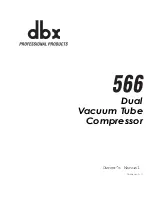
Reverse advanced group
Short name: Rev / Adv
Name
SCP text
Description
Min
Max
Default
Units Access
Feedback invert
Fbk / Invrt
Reverse feedback sender is inverted, i.e. high
fbk value = fully down
0
1
0
D
Deadband offset
DbOff
The offset which is used against the measured
deadband
0
10
2
drive D
Drive max volt
Drv / MaxV
Maximum drive voltage for the reverse
hydraulic valves
6
JIMN_NOMINA
L_VOLTAGE
16
volt
D
Error min
Err / Min
The minimum error for which the control loop
will try and position the reverse duct
0
160
32
none D
Alarm time
Alarm / Time
The time in seconds to wait for a reverse follow
up alarm
1
16
3
S
D
Alarm retries
Alarm / Retry
The number of retries before a reverse follow
up alarm is generated
1
30
3
D
Max linear
Max / Lin
The linear range on the reverse duct, this is a
ratio of the maximum value of this parameter (
16 )
1
16
9
D
Rev up limit
backoff
Up / BOff
The size of the limit backoff for the reverse duct
up posistion
10
256
64
F
Rev down limit
backoff
Dwn / BOff
The size of the limit backoff for the reverse duct
down position
10
256
64
F
Demand rate limit Rev / Limit
Limits the incoming demand rate so that the
demand takes 'x' ms to go from lock to lock. For
example, 0 means unlimited, 500 means 0.5 s
lock to lock, and 2000 means 2 s lock to lock.
100
4000
100
F
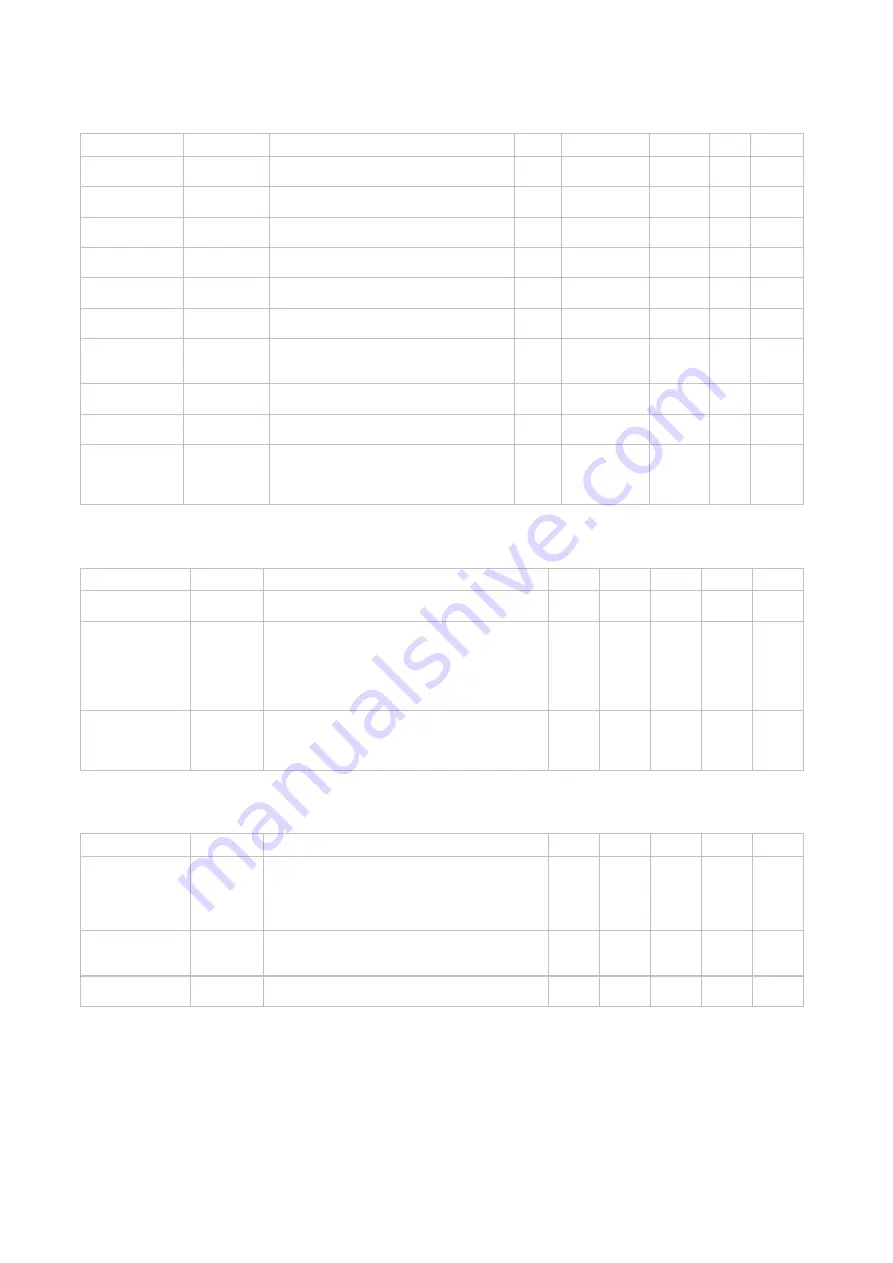
Advanced group
Short name: Adv
Name
SCP text
Description
Min
Max
Default Units
Access
Drive deadband
initial
DBIni
The initial deadband used, whilst setting up the valve
deadbands
0
75
25
drive
D
Hydraulic input
HydIn
The input method, which informs the jim that hydraulic
power is present:
Ei - EIM
Et - External
Ru - Engine running
Rp - Jet RPM
D
Bypass ADC filter
ByFlt
Set to bypass the final stage ADC filter used in the
steering and reverse loops. Used on JACM type
applications where the hydraulic response is more
important.
0
1
0
F
Drive compensation group
Short name: Drv / Comp
Name
SCP text
Description
Min
Max
Default Units
Access
Str load weight
SWght
The drive weighting that the steering valve is given
when the total load drive is exceeded for both
combined axis. It is usual that the steering axis will
receive more weighting than the reverse, due to the less
force required to drive
0
100
60
D
Rev load weight
RWght
The drive weighting that the steering valve is given
when the total load drive is exceeded for both
combined axis.
0
100
40
D
Load total drv
LTotD
The maximum combined drive value, before weighting
takes place
150
510
350
drive
D
Summary of Contents for HTX30
Page 1: ...HTX30 HTX30 Product Manual R0A5 blue ARROW...
Page 8: ...1 vi...
Page 20: ......
Page 26: ......
Page 178: ......
Page 181: ...Notes...