





























Appendix
HTX30 Product Manual
8-48
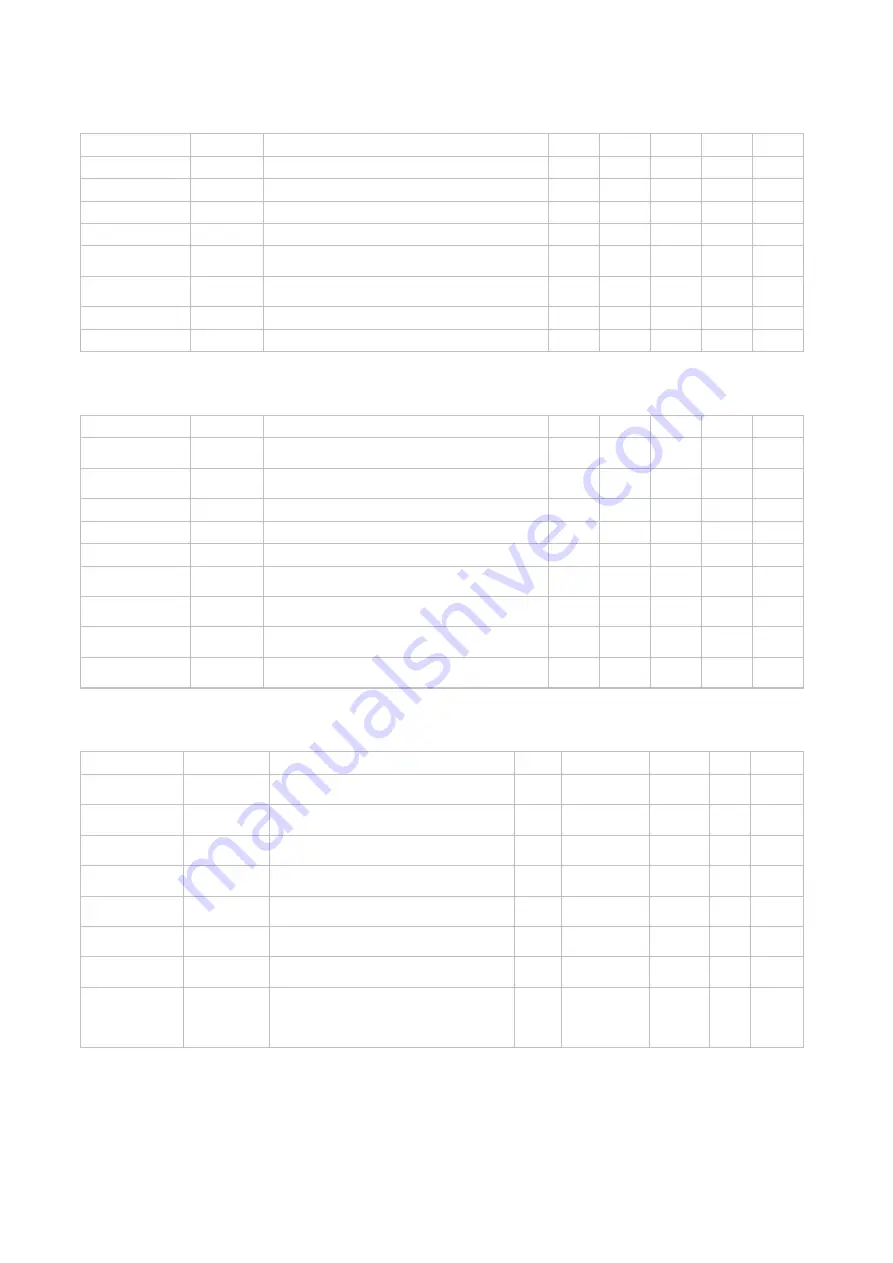
Steering control group
Short name: Str / Ctrl
Name
SCP text
Description
Min
Max
Default Units
Access
Kp
Kp
Proportional gain for the steering control loop
1
1000
90
D
Ki
Ki
Integral value for the steering control loop
0
1000
80
D
Kd
Kd
Differential value for the steering control loop
0
1000
80
D
Dither ampilitude
DithA
Reverse hydraulic valve dither amplitude
0
50
0
drive
D
Dither time period
DithT
Reverse hydraulic valve dither time period in
milliseconds
0
500
0
ms
D
Dither when stat
Dith / Stat
Enables steering valve dithering whilst the valve is not
been driven in either direction
0
1
0
D
Drive setup port
SUPrt
Drive value used whilst in setup, driving to port
10
100
20
drive
D
Drive setup stbd
SUStb
Drive value used whilst in setup, driving to stbd
10
100
20
drive
D
Reverse control group
Short name: Rev / Ctrl
Name
SCP text
Description
Min
Max
Default Units
Access
Kp Up
KpUp
Proportional gain for the reverse control loop when
driving in the up direction
1
1000
100
D
Kp Down
KpDn
Proportional gain for the reverse control loop when
driving in the down direction
1
1000
100
D
Ki
Ki
Integral value for the reverse control loop
0
1000
80
D
Kd
Kd
Differential value for the reverse control loop
0
1000
80
D
Dither ampilitude
DithA
Reverse hydraulic valve dither amplitude
0
50
0
drive
D
Dither time period
DithT
Reverse hydraulic valve dither time period in
milliseconds
0
500
0
ms
D
Dither when stat
Dith / Stat
Enables reverse valve dithering whilst the valve is not
been driven in either direction
0
1
0
D
Drive Setup Up
SUUp
Drive value used whilst in setup, driving the reverse
duct up
10
100
40
drive
D
Drive Setup Down
SUDwn
Drive value used whilst in setup, driving the reverse
duct down
10
100
40
drive
D
Steering advanced group
Short name: Str / Adv
Name
SCP text
Description
Min
Max
Default
Units Access
Feedback invert
Fbk / Invrt
Steering feedback sender is inverted, i.e. high
fbk value = fully port
0
1
0
D
Deadband offset
DbOff
The offset which is used against the measured
deadband
0
10
2
drive D
Drive max volt
Drv / MaxV
Maximum drive voltage for the steering
hydraulic valves
6
JIMN_NOMINA
L_VOLTAGE
16
volt
D
Error min
Err / Min
The minimum error for which the control loop
will try and position the steering nozzle
0
40
16
none D
Alarm time
Alarm / time
The time in seconds to wait for a steering follow
up alarm
1
16
3
S
D
Alarm retries
Alarm / Retry
The number of retries before a steering follow
up alarm is generated
1
30
3
D
Limit backoff
Str / BOff
The size of the limit backoff for the steerinf
nozzle
10
256
64
F
Demand rate limit Str / Limit
Limits the incoming demand rate so that the
demand takes 'x' ms to go from lock to lock. For
example, 0 means unlimited, 500 means 0.5 s
lock to lock, and 2000 means 2 s lock to lock.
100
4000
100
F
Summary of Contents for HTX30
Page 1: ...HTX30 HTX30 Product Manual R0A5 blue ARROW...
Page 8: ...1 vi...
Page 20: ......
Page 26: ......
Page 178: ......
Page 181: ...Notes...







































































