



























APPENDIX
App. - 50
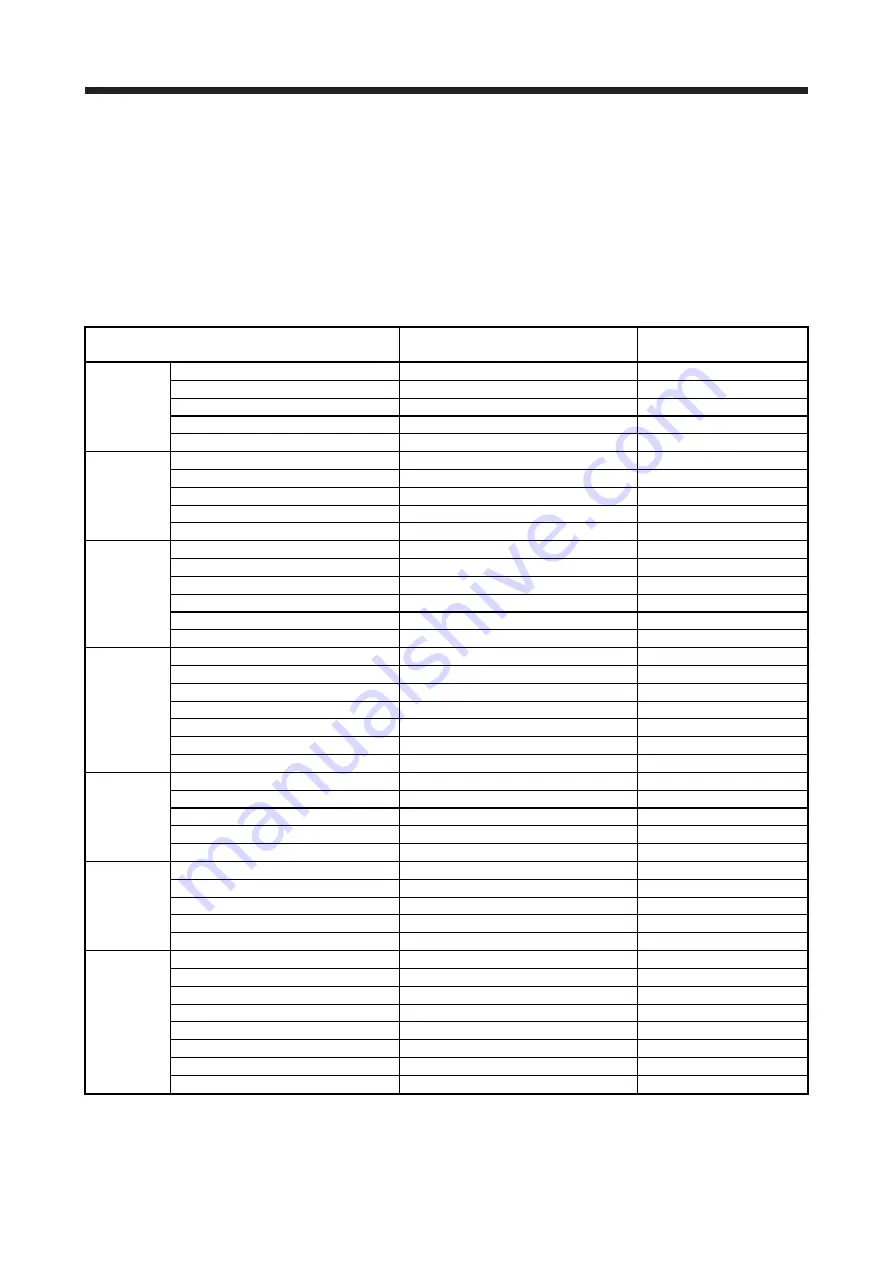
App. 10.4 Maximum current command (maximum torque) for analog monitor ±8 V
Values of the maximum current command (maximum torque) when the analog monitor is ±8 V are listed.
The current command (torque) outputs the maximum current command (maximum torque) at ±8 V. The
maximum current command (maximum torque) may not match the rated current/maximum current ratio since
it is created from the torque current in the servo amplifier.
App. 10.4.1 Rotary servo motor
(1) 200 V/100 V class
Servo motor
Servo amplifier/drive unit
Maximum current command
(maximum torque) [%]
HG-KR series
HG-KR053
MR-J4-10_(-RJ)/MR-J4-10_1(-RJ)
370
HG-KR13
MR-J4-10_(-RJ)/MR-J4-10_1(-RJ)
373
HG-KR23
MR-J4-20_(-RJ)/MR-J4-20_1(-RJ)
387
HG-KR43
MR-J4-40_(-RJ)/MR-J4-40_1(-RJ)
383
HG-KR73
MR-J4-70_(-RJ)
367
HG-MR series
HG-MR053
MR-J4-10_(-RJ)/MR-J4-10_1(-RJ)
342
HG-MR13
MR-J4-10_(-RJ)/MR-J4-10_1(-RJ)
336
HG-MR23
MR-J4-20_(-RJ)/MR-J4-20_1(-RJ)
396
HG-MR43
MR-J4-40_(-RJ)/MR-J4-40_1(-RJ)
361
HG-MR73
MR-J4-70_(-RJ)
345
HG-SR 1000
r/min series
HG-SR51
MR-J4-60_(-RJ)
311
HG-SR81
MR-J4-100_(-RJ)
329
HG-SR121
MR-J4-200_(-RJ)
353
HG-SR201
MR-J4-200_(-RJ)
334
HG-SR301
MR-J4-350_(-RJ)
366
HG-SR421
MR-J4-500_(-RJ)
347
HG-SR 2000
r/min series
HG-SR52
MR-J4-60_(-RJ)
302
HG-SR102
MR-J4-100_(-RJ)
310
HG-SR152
MR-J4-200_(-RJ)
320
HG-SR202
MR-J4-200_(-RJ)
327
HG-SR352
MR-J4-350_(-RJ)
332
HG-SR502
MR-J4-500_(-RJ)
341
HG-SR702
MR-J4-700_(-RJ)/MR-J4-DU900_(-RJ) 336
HG-UR series
HG-UR72
MR-J4-70_(-RJ)
355
HG-UR152
MR-J4-200_(-RJ)
340
HG-UR202
MR-J4-350_(-RJ)
350
HG-UR352
MR-J4-500_(-RJ)
320
HG-UR502
MR-J4-500_(-RJ)
330
HG-RR series
HG-RR103
MR-J4-200_(-RJ)
300
HG-RR153
MR-J4-200_(-RJ)
250
HG-RR203
MR-J4-350_(-RJ)
290
HG-RR353
MR-J4-500_(-RJ)
270
HG-RR503
MR-J4-500_(-RJ)
270
HG-JR 1000
r/min series
HG-JR601
MR-J4-700_(-RJ)/MR-J4-DU900_(-RJ) 337
HG-JR801
MR-J4-11K_(-RJ)/MR-J4-DU900_(-RJ)
366
HG-JR12K1
MR-J4-11K_(-RJ)/MR-J4-DU11K_(-RJ)
346
HG-JR15K1
MR-J4-15K_(-RJ)/MR-J4-DU15K_(-RJ)
339
HG-JR20K1
MR-J4-22K_(-RJ)/MR-J4-DU22K_(-RJ)
337
HG-JR25K1
MR-J4-22K_(-RJ)/MR-J4-DU22K_(-RJ)
330
HG-JR30K1
MR-J4-DU30K_(-RJ)
330
HG-JR37K1
MR-J4-DU37K_(-RJ)
330
Содержание MR-J4-100B(-RJ)
Страница 17: ...8 MEMO ...
Страница 143: ...4 STARTUP 4 20 MEMO ...
Страница 199: ...5 PARAMETERS 5 56 MEMO ...
Страница 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Страница 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Страница 303: ...9 DIMENSIONS 9 22 MEMO ...
Страница 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Страница 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Страница 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Страница 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Страница 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Страница 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Страница 653: ...APPENDIX App 40 This certificate is valid until 2017 02 28 After March 2017 use certificate shown on the previous page ...
Страница 654: ...APPENDIX App 41 ...







































































