




























14. USING A LINEAR SERVO MOTOR
14 - 24
14.3.4 Test operation mode in MR Configurator2
CAUTION
The test operation mode is designed for checking servo operation. It is not for
checking machine operation. Do not use this mode with the machine. Always use
the linear servo motor alone.
If the servo motor operates abnormally, use EM2 (Forced stop 2) to stop it.
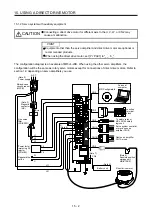
POINT
The content described in this section indicates the environment where the servo
amplifier and a personal computer are directly connected.
When the test operation mode is selected with the test operation select switch
(SW2-1), the SSCNET III/H communication for the servo amplifier in the test
operation mode and the following servo amplifiers is blocked.
By using a personal computer and MR Configurator2, you can execute the positioning operation, the output
signal (DO) forced output, and the program operation without connecting the servo system controller.
(1) Test operation mode type
(a) Positioning operation
Positioning operation can be performed without using the servo system controller. Use this operation
with the forced stop reset. This operation may be used independently of whether the servo is on or
off and whether the servo system controller is connected or not.
Exercise control on the positioning operation screen of MR Configurator2.
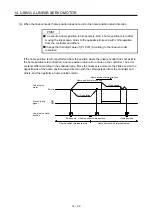
1) Operation pattern
Item
Initial value
Setting range
Travel distance [pulse]
1048576
0 to 99999999
Speed [mm/s]
10
0 to Maximum speed
Acceleration/deceleration
time constant [ms]
1000
0 to 50000
Repeat pattern
Positive direction travel
→
Negative direction travel
Positive direction travel
→
Negative direction travel
Positive direction travel
→
Positive direction travel
Negative direction travel
→
Positive direction travel
Negative direction travel
→
Negative direction travel
Dwell time [s]
2.0
01 to 50.0
Number of repeats [time]
1
1 to 9999
2) Operation method
Operation Screen
control
Positive direction travel
Click "Positive Direction Movement".
Negative direction travel Click "Reverse Direction Movement".
Pause Click
"Pause".
Stop Click
"Stop".
Forced stop
Click "Forced stop".
Содержание MR-J4-100B(-RJ)
Страница 17: ...8 MEMO ...
Страница 143: ...4 STARTUP 4 20 MEMO ...
Страница 199: ...5 PARAMETERS 5 56 MEMO ...
Страница 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Страница 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Страница 303: ...9 DIMENSIONS 9 22 MEMO ...
Страница 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Страница 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Страница 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Страница 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Страница 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Страница 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Страница 653: ...APPENDIX App 40 This certificate is valid until 2017 02 28 After March 2017 use certificate shown on the previous page ...
Страница 654: ...APPENDIX App 41 ...