




























5. PARAMETERS
5 - 40
No.
Symbol
Name and function
Initial
value
[unit]
Setting
range
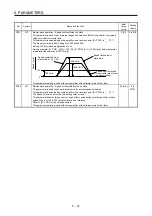
PC24
RSBR
Forced stop deceleration time constant
This is used to set deceleration time constant when you use the forced stop deceleration
function.
Set the time per ms from the rated speed to 0 r/min or 0 mm/s. Setting "0" will be 100 ms.
Forced stop deceleration
[Pr. PC24]
0 r/min
(0 mm/s)
Servo motor speed
Rated speed
Dynamic brake
deceleration
(Linear servo motor
speed)
[Precautions]
If the servo motor torque or linear servo motor thrust is saturated at the maximum torque
during forced stop deceleration because the set time is too short, the time to stop will be
longer than the set time constant.
[AL. 50 Overload alarm 1] or [AL. 51 Overload alarm 2] may occur during forced stop
deceleration, depending on the set value.
After an alarm that leads to a forced stop deceleration, if an alarm that does not lead to a
forced stop deceleration occurs or if the control circuit power supply is cut, dynamic braking
will start regardless of the deceleration time constant setting.
Set a longer time than deceleration time at quick stop of the controller. If a shorter time is
set, [AL. 52 Error excessive] may occur.
100
[ms]
0 to
20000
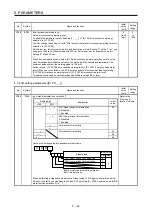
PC26 **COP8 Function selection C-8
Used to select the communication method of the encoder cable to be connected to the CN2L
connector of MR-J4-_B_-RJ.
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ _ x
For manufacturer setting
0h
_ _ x _
0h
_ x _ _
0h
x _ _ _
Load-side encoder communication method
0: Two-wire type
1: Four-wire type
When using a load-side encoder of A/B/Z-phase differential output
method, set "0".
Setting "1" by using a servo amplifier other than MR-J4-_B_-RJ will
trigger [AL. 37].
0h
Содержание MR-J4-100B(-RJ)
Страница 17: ...8 MEMO ...
Страница 143: ...4 STARTUP 4 20 MEMO ...
Страница 199: ...5 PARAMETERS 5 56 MEMO ...
Страница 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Страница 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Страница 303: ...9 DIMENSIONS 9 22 MEMO ...
Страница 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Страница 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Страница 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Страница 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Страница 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Страница 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Страница 653: ...APPENDIX App 40 This certificate is valid until 2017 02 28 After March 2017 use certificate shown on the previous page ...
Страница 654: ...APPENDIX App 41 ...







































































