


























17. APPLICATION OF FUNCTIONS
17 - 76
17.3.2 Scale measurement encoder
POINT
Always use the scale measurement encoder cable introduced in this section.
Using other products may cause a malfunction.
For details of the scale measurement encoder specifications, performance and
assurance, contact each encoder manufacturer.
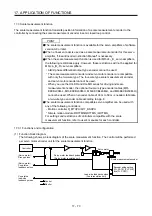
(1) Linear encoder
Refer to "Linear Encoder Instruction Manual" for usable linear encoders.
To use the scale measurement function in the absolute position detection system ([Pr. PA22] = 1_ _ _),
an absolute position linear encoder is required. In this case, you do not need to install the encoder
battery to the servo amplifier for backing up the absolute position data of the load side. To use a servo
motor in the absolute position detection system ([Pr. PA03] = _ _ _1), the encoder battery must be
installed to the servo amplifier for backing up the absolute position data of the servo motor side.
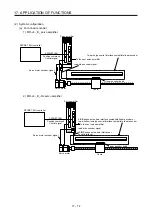
(2) Rotary encoder
When a rotary encoder is used as a scale measurement encoder, use the following servo motor or
synchronous encoder as the encoder.
Servo motor and synchronous encoder that can be used as encoder
HG-KR HG-MR
Synchronous encoder
Q171ENC-W8
MR-J4-_B_
MR-J4-_B_-RJ
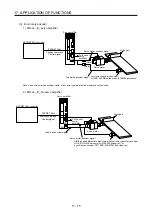
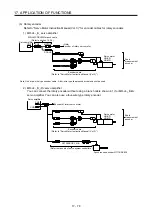
Use a two-wire type encoder cable for MR-J4-_B_ servo amplifiers. Do not use MR-EKCBL30M-L, MR-
EKCBL30M-H, MR-EKCBL40M-H, or MR-EKCBL50M-H as they are four-wire type.
When an encoder cable of 30 m to 50 m is needed, fabricate a two-wire type encoder cable according to
app. 8.
To use the scale measurement function in the absolute position detection system ([Pr. PA22] = 1_ _ _),
the encoder battery must be installed to the servo amplifier for backing up the absolute position data of
the load side. In this case, the battery life will be shorter because the power consumption is increased as
the power is supplied to the two encoders of motor side and load side.
Содержание MR-J4-100B(-RJ)
Страница 17: ...8 MEMO ...
Страница 143: ...4 STARTUP 4 20 MEMO ...
Страница 199: ...5 PARAMETERS 5 56 MEMO ...
Страница 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Страница 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Страница 303: ...9 DIMENSIONS 9 22 MEMO ...
Страница 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Страница 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Страница 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Страница 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Страница 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Страница 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Страница 653: ...APPENDIX App 40 This certificate is valid until 2017 02 28 After March 2017 use certificate shown on the previous page ...
Страница 654: ...APPENDIX App 41 ...