



























5. PARAMETERS
5 - 48
5.2.5 Extension setting 2 parameters ([Pr. PE_ _ ])
No.
Symbol
Name and function
Initial
value
[unit]
Setting
range
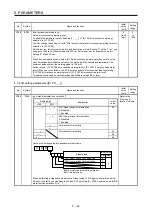
PE01 **FCT1 Fully closed loop function selection 1
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ _ x
Fully closed loop function selection
0: Always enabled
1: Switching with the control command of controller
(switching semi./full.)
0h
Switching with the control
command of controller
Control method
Off
Semi closed loop control
On
Fully closed loop control
To enable the digit, select "Fully closed loop control mode (_ _ 1 _)"
of "operation mode selection" in [Pr. PA01].
When "Absolute position detection system selection" is "Enabled (_
_ _ 1)" in [Pr. PA03], setting "1" will trigger [AL. 37 Parameter error].
_ _ x _
For manufacturer setting
0h
_ x _ _
0h
x _ _ _
0h
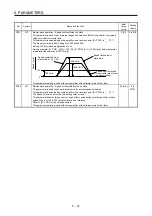
PE03
*FCT2
Fully closed loop function selection 2
Refer to the
"Name and
function" column.
Setting
digit
Explanation
Initial
value
_ _ _ x
Fully closed loop control error detection function selection
0: Disabled
1: Speed deviation error detection
2: Position deviation error detection
3: Speed deviation error/position deviation error detection
3h
_ _ x _
Position deviation error detection system selection
0: Continuous detection system
1: Detection system at stop (detected with command set to "0")
0h
_ x _ _
For manufacturer setting
0h
x _ _ _
Fully closed loop control error reset selection
0: Reset disabled (reset by powering off/on enabled)
1: Reset enabled
0h
PE04
**FBN
Fully closed loop control - Feedback pulse electronic gear 1 - Numerator
This is used to set a numerator of electronic gear for the servo motor encoder pulse at the fully
closed loop control.
Set the electronic gear so that the number of servo motor encoder pulses for one servo motor
revolution is converted to the resolution of the load-side encoder.
1 1
to
65535
PE05
**FBD
Fully closed loop control - Feedback pulse electronic gear 1 - Denominator
This is used to set a denominator of electronic gear for the servo motor encoder pulse at the
fully closed loop control.
Set the electronic gear so that the number of servo motor encoder pulses for one servo motor
revolution is converted to the resolution of the load-side encoder.
1 1
to
65535
PE06
BC1
Fully closed loop control - Speed deviation error detection level
This is used to set [AL. 42.9 Fully closed loop control error by speed deviation] of the fully
closed loop control error detection.
When the speed deviation between the servo motor encoder and load-side encoder becomes
larger than the setting value, the alarm will occur.
400
[r/min]
1 to
50000
PE07
BC2
Fully closed loop control - Position deviation error detection level
This is used to set [AL. 42.8 Fully closed loop control error by position deviation] of the fully
closed loop control error detection.
When the position deviation between the servo motor encoder and load-side encoder
becomes larger than the setting value, the alarm will occur.
100
[kpulse]
1 to
20000
Содержание MR-J4-100B(-RJ)
Страница 17: ...8 MEMO ...
Страница 143: ...4 STARTUP 4 20 MEMO ...
Страница 199: ...5 PARAMETERS 5 56 MEMO ...
Страница 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Страница 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Страница 303: ...9 DIMENSIONS 9 22 MEMO ...
Страница 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Страница 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Страница 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Страница 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Страница 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Страница 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Страница 653: ...APPENDIX App 40 This certificate is valid until 2017 02 28 After March 2017 use certificate shown on the previous page ...
Страница 654: ...APPENDIX App 41 ...







































































