





















11. OPTIONS AND PERIPHERAL EQUIPMENT
11 - 14
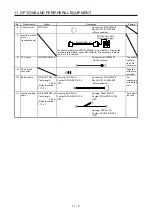
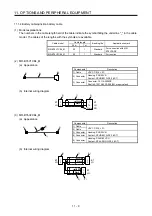
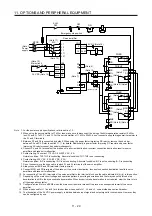
(2) Linear servo motor
(a) Thrust and energy calculation
Linear servo motor
secondary-side (magnet)
Load
V
M
1
M
2
Linear servo motor
primary-side (coil)
Linear servo motor
F
t
2)
1)
V
3)
4)
Positive
direction
6)
5)
7)
Negative
direction
8)
Time
Feed speed
t
psa1
t
1
t
psd1
t
2
t
psa2
t
3
t
4
t
psd2
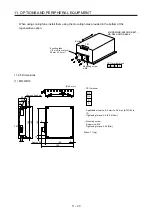
The following shows equations of the linear servo motor thrust and energy at the driving pattern
above.
Section
Thrust F of linear servo motor [N]
Energy E [J]
1) F
1
= (M
1
+ M
2
) • V/t
psa1
+ F
t
E
1
= V/2 • F
1
• t
psa1
2) F
2
= F
1
E
2
= V • F
2
• t
1
3) F
3
= -(M
1
+ M
2
) • V/t
psd1
+ F
t
E
3
= V/2 • F
3
• t
psd1
4), 8)
F
4,
F
8
= 0
E
4
, E
8
= 0 (No regeneration)
5) F
5
= (M
1
+ M
2
) • V/t
psa2
+ F
t
E
5
= V/2 • F
5
• t
psa2
6) F
6
= F
t
E
6
= V • F
6
• t
3
7) F
7
= -(M
1
+ M
2
) • V/t
psd2
+ F
t
E
7
= V/2 • F
7
• t
psd2
From the calculation results in 1) to 8), find the absolute value (Es) of the sum total of negative
energies.
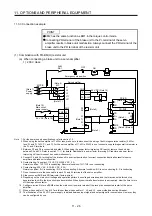
(b) Losses of servo motor and servo amplifier in regenerative mode
For inverse efficiency and capacitor charging energy, refer to (1) (b) in this section.
(c) Regenerative energy calculation
Subtract the capacitor charging from the result of multiplying the sum total of regenerative energies
by the inverse efficiency to calculate the energy consumed by the regenerative resistor.
ER [J] =
η
• Es - Ec
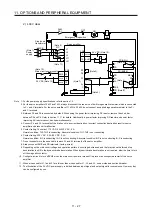
From the total of ER's whose subtraction results are positive and one-cycle period, the power
consumption PR [W] of the regenerative option can be calculated with the following equation.
PR [W] = total of positive ER's/one-cycle operation period (tf)
Select a regenerative option from the PR value. Regenerative option is not required when the energy
consumption is equal to or less than the built-in regenerative energy.
Содержание MR-J4-100B(-RJ)
Страница 17: ...8 MEMO ...
Страница 143: ...4 STARTUP 4 20 MEMO ...
Страница 199: ...5 PARAMETERS 5 56 MEMO ...
Страница 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Страница 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Страница 303: ...9 DIMENSIONS 9 22 MEMO ...
Страница 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Страница 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Страница 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Страница 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Страница 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Страница 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Страница 653: ...APPENDIX App 40 This certificate is valid until 2017 02 28 After March 2017 use certificate shown on the previous page ...
Страница 654: ...APPENDIX App 41 ...