




























14. USING A LINEAR SERVO MOTOR
14 - 23
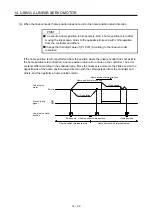
(2) Absolute position linear encoder
POINT
The data set type home position return can also be carried out.
When an absolute linear encoder is used, the reference home position is the position per 1048576
pulses (changeable with the third digit of [Pr. PL01]) with reference to the linear encoder home position
(absolute position data = 0).
In the case of a proximity dog type home position return, the nearest reference home position after
proximity dog off is the home position. The linear encoder home position can be set in any position. LZ
(Encoder Z-phase pulse) is outputted based on "Stop interval selection at the home position return" in
[Pr. PL01].
1048576 pulses × n
Linear encoder home position
Home position
Home position return speed
Creep speed
Home position return direction
ON
OFF
Proximity dog
signal
Linear servo
motor
Reference home
position
Linear servo motor
position
1048576 pulses
0 mm/s
(Note)
Note. Changeable with [Pr. PL01].
Содержание MR-J4-100B(-RJ)
Страница 17: ...8 MEMO ...
Страница 143: ...4 STARTUP 4 20 MEMO ...
Страница 199: ...5 PARAMETERS 5 56 MEMO ...
Страница 227: ...6 NORMAL GAIN ADJUSTMENT 6 28 MEMO ...
Страница 281: ...8 TROUBLESHOOTING 8 16 MEMO ...
Страница 303: ...9 DIMENSIONS 9 22 MEMO ...
Страница 319: ...10 CHARACTERISTICS 10 16 MEMO ...
Страница 429: ...11 OPTIONS AND PERIPHERAL EQUIPMENT 11 110 MEMO ...
Страница 435: ...12 ABSOLUTE POSITION DETECTION SYSTEM 12 6 MEMO ...
Страница 483: ...14 USING A LINEAR SERVO MOTOR 14 34 MEMO ...
Страница 531: ...16 FULLY CLOSED LOOP SYSTEM 16 26 MEMO ...
Страница 613: ...17 APPLICATION OF FUNCTIONS 17 82 MEMO ...
Страница 653: ...APPENDIX App 40 This certificate is valid until 2017 02 28 After March 2017 use certificate shown on the previous page ...
Страница 654: ...APPENDIX App 41 ...







































































